
DBJX-202 �ھ��Һѹ���̻�еʵѵ̨
Һѹ�ھ���ǻ�е��������Ҫ�Ļ�е�����㷺Ӧ���ڹ��̽�����ʩ����·��ˮ�����̡��� �����µ���ʯ��ʩ���Լ���ɽ�ɾ���ҵ�� Ŀǰ��С���ھ������ȫ��������Һѹ������Һѹ�� �����֮��еʽ�ھ���������С�������ᡢ�������㡢�ھ���������ʵ�ֹ��ر����� Զ������ݵ��ŵ㡣�������������Ӽ�����Һѹ�����ϵ�Ӧ�ã�ʹ���̻�е��������е�ۺ� ����ˮƽԽ��Խ�ߣ��������Щ��е��ʹ�ÿɿ��ԡ�������ȫ�ԡ������Ժ�ʹ������������Ӧ �Ը�ǿ��
�ھ��Һѹ���̻�еʵѵ̨���Ե���Һѹ�ھ��еΪ�������ƿ�����һ��ʵѵƽ̨��ʵѵ̨ �ṹ���գ�������������������ȫ�ɿ��������ʵ���������豸������˳���������ʵ ����û�й��̻�е�豸�Ŀհף���ʹѧ�����Բ������Ҿ����˽��ھ��е�Ľṹ��ԭ�������� ���Լ����ֲ�����ʵѵ̨���ж��ֿ��Ʒ�ʽ�����ֶ����ơ��̵�����������пɱ�̿��ƣ� ����ʹѧ���ܹ���ɻ������Ʒ�ʽ����̽�����Զ�����ΪĿ�ĵ�ȫ�²���ģʽ��

(�ο�ͼ)
һ��ʵ����Ŀ
1��Һѹ������Ԫ�����ṹ������ԭ����Ħ����װʵ�顣
2��Һѹ�ھ��е��ʾ����ʵ�顣
3��PLC ����������ʾ������ʵ�顣
4���ɱ�����������PLC�� ��������ʵ�飺��-��-Һһ�����ʵ�顣
����ʵ������
1��Һѹ�ھ��е��ʾ����ʵ��
1���ھ���ҵ�������Ͷ��˸��Ͻ��й���ʵ�飻
2����ת��ҵ����������ͬʱƽ̨��ת��
3��ж����ҵ�����˺Ͳ�������ͬʱ��ۿɵ���λ�ø߶ȣ�
4�����أ�ƽ̨��ת�����ۺͶ�����ϻص��ھ�ʼλ�á�
2���ɱ�����������PLC�� ��������ʵ�飺��-��-Һһ�����ʵ�顣
1) PLC ָ���̡�����ͼ���ѧϰ��
2) PLC ���������ѧϰ��ʹ�ã�
3) PLC ��������ͨѶ�����ߵ��ԣ�
4) PLC ��Һѹ���������е�Ӧ���Լ����Ʒ������Ż���
�����������ص�
1��ʵ��̨���������ְ壨���������ܡ�����������������̨ʽ�ṹ�����Ʋ�����һ�塣
2��������������Ϊ����ʽ��Һѹվ������Һѹ̨�����ڡ�����ṹ���գ�Э�������� ���۴�ʵ����ǿ���ɹ� 4-6 ��ʵ�顣
3���ھ��е��ʵ�������С��ȫ�����ṹ��ʵ��ʱ����Һѹϵͳ����ʵ��Ҫ��ģ��� ����е���й�����
4���ھ��е�ǰ�ʵ��Ľṹ����С�����������ɣ��ܹ���ʵ���������е��ʵ�ʹ����� ʹѧ���ܹ���ʵ��������˽�������ĸ������Ľṹ�빤��ԭ����
5��ʵ����Ʋ����ֶ����ơ� �Զ��������ַ�ʽ��
6��ʵ�鲿��������ѹ���ܣ�ѹ���ɴﵽ 25Mpa��
7��������©�籣���������ѹ 380V/220V���Ե�©��������� 30mA ���жϵ�Դ�� �� �����Ʋ���ֱ�� 24V ��Դ�������й�ѹ��������ֹ��������豸��
�ġ���Ҫ��������
����ͺţ�M3P4H523 ���ʣ�0.75KW ת�٣�1420r/min
�ͱ��ͺţ�VAI-15F-A3 ����ѹ����0-4Mpa �������8ml/rev
���γߴ磺1550×650×1800mm
�塢����˵��
1����ͣ �D�D��ϵͳ�����£����´˰�ť��������ֹͣ��
2���ֶ�-PLC ת������ �D�D��ת�˿��ؿ�ʵ�̵ּ������ƻ� PLC ��̿��ơ� 3���ÿ��� �D�D���´˰�ť��������ù�ѹ�������������õ�����ѹ���� 4�������� �D�D�ƶ����ݸ˶������������ڽ�����J2 �ɿ��ƶ��������ٶȡ� 5�����۽� �D�D�ƶ����ݸ˶����½������ڽ����� J1 �ɿ��ƶ����½��ٶȡ� 6�������� �D�D�ƶ����ݸ˶������������ڽ�����J3 �ɿ��ƶ��������ٶȡ� 7�����˽� �D�D�ƶ����ݸ˶����½������ڽ�����J4 �ɿ��ƶ����½��ٶȡ� 8�������� �D�D���´˰�ť�������������ڽ�����J5 �ɿ��Ʋ��������ٶȡ� 9�������� �D�D�ƶ����ݸ˲����½������ڽ�����J6 �ɿ��Ʋ����½��ٶȡ� 10����ת̨�� �D�D�ƶ����ݸ˻�ת̨��ת�� 11����ת̨�� �D�D�ƶ����ݸ˻�ת̨��ת��
12���������� �D�D���ֶ�-PLC ת��������ת�� PLC λ�ã����´˰�ť���Ƴ������С�
13������ֹͣ �D�D�ڳ��������£����´˰�ť���Ƴ�������ֹͣ��
14���ɱ�̿����� �D�D���� FX1S-20MR
����Һѹϵͳԭ��ͼ
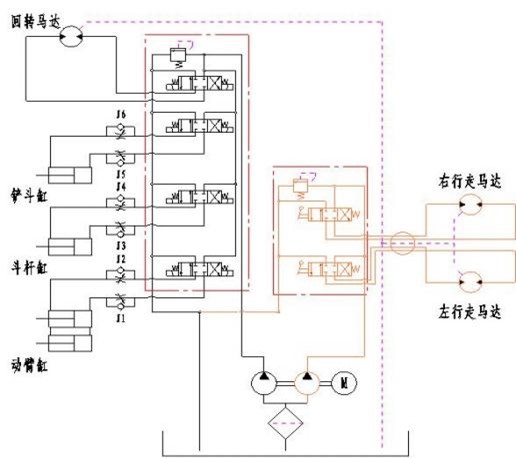
ͼ 2 Һѹϵͳԭ��ͼ
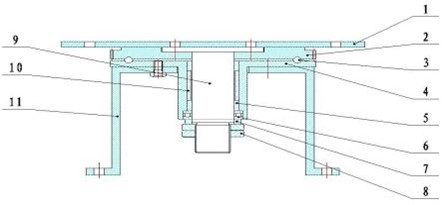
�ߡ��ھ��������˵��
(һ)���ơ�ִ�л���
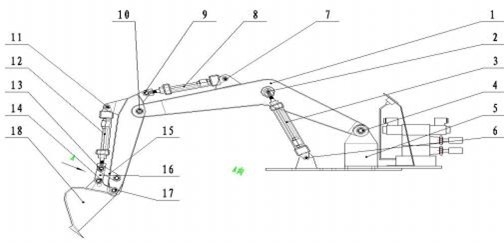
ͼ 3I �ھ��������˵��
1���� �� �� �D �D����ۣ��е��ھ�����ھ���ʱ�Ķ�λ��������ж���ȹ��ܣ����붷
�ˡ������ĺ���������ھ��ܷ�ﵽ���Ч������Ҫ���ء�
2���� �� I �D�D�������붯�۸�����������������������֧�㡣
3���� �� �� �D�D������������������λ�Ķ���֧�š�
4���� �� II �D�D���������ת̨����֧�����������ʹ�������Դ˵�ΪԲ�ġ����� I ��Ϊ�뾶���������˶���
5��֧ �� �� I �D�D������֧������
6��֧ �� �� II �D�D���۸�֧������
7��֧���� III �D�D���˸�֧������
8���� �� �� �D�D����������
9���� �� III �D�D�����붷�˸������ᡣ
10���� �� IV �D�D����������������֧�㡣
11��֧���� IV �D�D������֧������
12���� �� �� �D�D�˸���������ڡ�ж��
13���� �� V �D�D�����������Ӱ�������ᡣ
14���� �� VI �D�D���������Ӱ�������ᡣ
15���� �Ӱ� I �D�D�������붷�˵����Ӱ塣
16�����Ӱ� II �D�D����������������Ӱ塣
17���� �� VII �D�D�����붷�˵������ᡣ
18���� �� �D�D�ڡ�ж����ִ�л�����
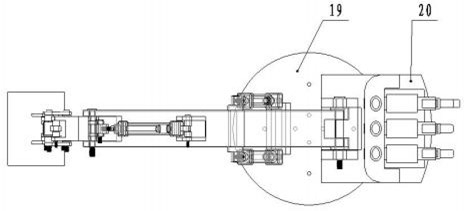
ͼ 3II �ھ��������˵��
19����תƽ̨ �D�D���п��ơ�ִ�л�����֧��ƽ̨�����²���������ת�������ӣ����� �������ʹִ�в�λ��ָ���Ƕ��ھ�
20���� �� �D�D����Ԫ������ʾ�DZ�֧�Ű塣
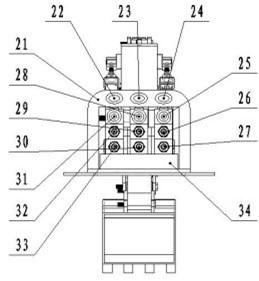
ͼ 4 �ھ�����Ʋ���˵��
21���� �� �� �D�Dϵͳѹ������ʾ�̡�
22��ѹ �� �� I �D�D��������ѹ����ʾ��
23��ѹ���� II �D�D���˹���ѹ����ʾ��
24��ѹ���� III �D�D�����۹���ѹ����ʾ��
25���� �� �� I �D�D�������콵���Ʒ���
26���� �� �� I �D�D�������콵�ٶȿ��Ʒ���
27���� �� �� �D�Dϵͳѹ�����Ʒ���
28������ II �D�D�����������Ʒ���
29�������� II �D�D��������ٶȿ��Ʒ���
30�������� III �D�D���������ٶȿ��Ʒ���
31������ III �D�D�����������Ʒ���
32�������� IV �D�D��������ٶȿ��Ʒ���
33�������� V �D�D���������ٶȿ��Ʒ���
34���� �� �D�D���Ʒ��ĵ�����
(��)��ת���� I
1���� ת ƽ ̨ �D�D���п��ơ�ִ�л�����֧��ƽ̨�����²���������ת�������ӣ����� �������ʹִ�в�λ��ָ���Ƕ��ھ����� 19 �
2������ת���� �D�D��������֣�������תƽ̨��Ϲ�����ת������
3���� �� �D�D�������̶�������ã���������ƽ�����ͬ��
4���� �� �� �D�D������ת������
5���� ͭ ���� �D�D��ת�����ס�
6���� �� I �D�Dƽ����������С�
7���� Ȧ �D�Dƽ���Ȧ��
8���� ĸ �D�D����ϸ������ĸ��
9���� �� ���� �D�D����ֶ�λ�ᡣ
10���� �� �D�D���ᶨλ���ס�
11��֧ �� �D�D����֧����
(��)��ת���� II
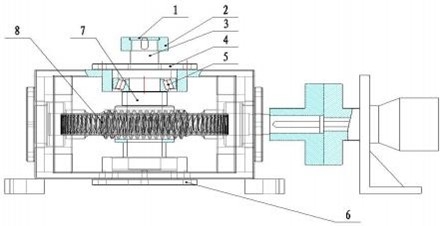
ͼ 6I �ھ����ת����˵��
1���� �� �D�DС���ֶ�λ�ǰ塣
2��С �� �� �D�D����С���֣����������ϴ����ϲ�ִ�л�����ת��
3���� �� �� �D�D��������ᡣ
4�� �� I �D�D����������ǡ�
5���� �� II �D�D�������Բ������С�
6���� �� I �D�D����������Ƹǡ�
7���� λ �� �D�D������λ�ס�
8���� �� �D�D���ָ����������ٵ����á�
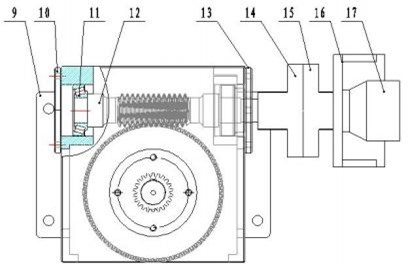
ͼ 6II �ھ����ת����˵��
9�����ּ��ٻ�����
10���� �� II �D�D�ϸ����Ƹǡ�
11���� �� III �D�D�ϸ�����Բ������С�
12���� �� �D�D��������ϸˣ��ϸ����������һ�������������봫�����á�
13�� �� II �D�D�������ǡ�
14���� �� �� I �D�D���ٻ�����������
15���� ���� II �D�D�������������
16���� �� �D�D���������
17���� �� �D�D�����������
�ˡ�����ǰ���
1������ǰ������λ�����쳣����������ȷ����ȫ������������˲���ֵ�������� λӦ��©�͡����졢��ζ�����¹�������
2���������������ӹ̶�����������ɶ�����ĸ����˨�����������ܽ�ͷ��
3����鹤��װ�ù���������ھ���������ת��ж���ȹ������������ۡ����ۡ��ڶ���Һ ѹ�Ȳ������½Ӵ������Ϳ����ͣ�
4���������豸�����������
�š�����ע������
1����ʵ��Ԫ�����ṹ���òĵ������ԣ���ʵ��Ĺ��������ע��������ŷ�ֹ��ײ���ڻ� ·ʵ�������ȷ�ϰ�װ����������ܽ��м�ѹʵ�顣
2����ʵ��֮ǰ������ϤԪ�����Ĺ���ԭ���Ͷ��������������տ�����ϵķ��������Խ�ֹ ǿ�в�ж����Ҫǿ����Ť����Ԫ�����ֱ������������Ϊ��
3���벻Ҫ������������Ҫ�����������ɣ���������ѹ������
4��ѧ����ʵ��ʱ��Ӧ��ѹ������̫��(��������ѹ��Ϊ 4��7MPa)��
5��ѧ��ʹ�ñ�ʵ��ϵͳ֮ǰһ��Ҫ�˽�Һѹʵ�����˽Ȿʵ��ϵͳ�IJ�����̣���ʵ ����ʦ��ָ���½��У�����äĿ����ʵ�顣
6��ѧ��ʵ������У����ֻ�·���κ�һ�������⣬��ʱӦ�����رձã�ֻ�е���·��ѹ�� �������½���ʵ�顣
7��ʵ����Ϻ�Ҫ������Ԫ������ע���Ԫ���ı�����ʵ��̨�����ࡣ
8�������ͱõ����Ч�ʣ�ʵ�����ʱ��һ��ȡ80%��
9������·���Ӳ��õ��ǿ���ʽ���ٽ�ͷ��ʵ��ʱ����·����һ����ѹ��������С�� 7 ��/ ��ʱ���ɺ��Բ��ƣ��������� 7 ��/��ʱÿ������ʽ��ͷѹ��ԼΪ 0.1��0.4Mpa��
ʮ��ʵ�鲽��
�γ�ʵ����ֶ����ƺ� PLC ���ƣ��ֶ�������Ҫ�ɰ�ť������PLC ����������ѧ����̿� ��������
�������ݺ�����������ַ������ھ����ѭ����ҵ�Ļ�е��ÿ����ҵѭ��������������ۡ� ��ת��ж������ת�ͽ���� 6 ��������ɡ���ν�����������ǽ����� 6 �������ֿ�ȥ�������� ��һ��������������һ����������������������������У�ʹ�ڶ������ˡ���ۺͻ�ת���ݸ� ����ť���Ķ���������Э��������������ھ����̵�ʱ���ڣ����һ����ҵѭ����������ھ����ҵЧ�ʡ���������ķ��������Ҫ�����¡�
1���������ڶ����ۡ����˲��ݸ˵���ϣ�
����ʱ������Ӧ�����´��ѹס�ڶ���ʹ�ڶ����������ķ����������𣬴�ʱ��ۿ��Ʒ� ���ݸˣ���ť������������λ�á��ڶ���ʼ������۵�ѹ��ʹ�ڶ��������У� ���������� ������ʹ�ڶ��������ٶȼ�������ֹͣ�����ƣ���ʱ������������ۣ��������ڶ����ݸ˻� ť�������ڶ��ھ��ٶ�����ߺ��������ɴ�۲��ݸˣ���ť����ʹ��۲������������������ �����ڶ���������̫��������������ʱ��Ӧ��ʱ�Խ���ۣ������ھ���ȡ���˷�����ʹ�ڶ� ��ͣ����ת�ھ��ھ����̵�ʱ����װ��������
����������ϵĹؼ��Ǵ�۵�����ʱ�����뼰ʱȷ��Ҫ���粻�������߲��͡�
�ھ���ھ���Ͻ�������ʱ������Ҫ�ջض��ˣ����ʹ�ۣ�ʹ�ڶ��������У���ʱ��Ҫע ���ڶ���ת���ٶȣ���ʱ�ա��춷�ˣ����ڶ���ת�ٶȹ���ʱ���ڶ��ھ����̫�٣�Ҫ���ն� �ˣ���ת�ٶȹ���ʱ���ڶ��ھ���������࣬Ҫ��ʱǰ�춷�ˣ��Ա�֤�ڶ���ͣ���ھ�������
����������ϵĹؼ��Ƕ��˵�����Ҫ��ʱȷ��
2����ת��������ת���ݸ˵���ϣ�
�����ת�̻�ת���ݸˣ���ť�����������ת����ת�н��еġ������ڶ������������� ������ۣ����ڶ��뿪����ʱ��Ҫ����ʹת����ת��ʹ�������ת�м������ߵ���Ҫ�ĸ߶ȡ� ��ʱ�������ֵ�ע����Ҫ�۲��ڶ�����ظ߶Ⱥ��ڶ�ǰ�������ϰ�����Ŀ���ڶ��߶Ȳ��� Խ���ϰ���ʱ��Ҫ������ת�ٶȻ�ֹͣת����ʹ��۽�һ�����ߺ������ת��
3��ж������ת���ڶ����ݵ���ϣ�
��ת���ڶ����ݸˣ���ť�������Ҳ��ת����ת�����н��еġ���ʱ��������ԱҪע���� ����λ�ã����ڶ�����ж���������������ڶ����ݸˣ���ť��ʹ֮ж�������ڶ�ж��Լ 1��2 ʱ�� ��ʼ���ݻ�ת�ȵ������ݸˣ���ť����ʹת�̻�ת����ʹ�ڶ��ڻ�ת�м���ж����ֱ��ж��Ϊֹ�� ����һ�����У�������Աע����Ҫ�����ڶ�ж���ϣ������ж�������ڶ�����ж������Ҫ��ͣ ��ת��ʹ�ڶ�ж�������ټ�����ת������ڶ��ѽӴ������������ڵ�����δȫ��ж�꣬��ʱӦ ��һ�´�ۺ���ж����Ҳ�ɱ�����۱�ж����
4����ת����ת���۲��ݸ˵���ϣ�
���ڶ��ڵ�����ȫж������������ת�Ĺ����У�ӦѸ��ʹ����½������ڶ���Ҫ�������� ��ʱ����ʼ������ת���ݸˣ���ť����ʹ�ڶ�ƽ�ȵ�ͣ������λ�ã��������½���ۣ�ʹ�ڶ��� ����ز��������У���ʼ��һѭ����������ҵ��
�ھ����ѭ����ҵ�����У������ȵ�����������������ϡ�Э�������ģ���ijһʱ���ڣ��������ݸˣ���ť��ͬʱ�������Ӷ���ʹ�ھ������װ�ò�ͣ�ع������ﵽ�˽�ʡʱ�䡢���� �������ġ���������ʵ�Ŀ�ġ�
ʮһ Ӧ����ҵ(�ο�)
1 ���������ھ�
�� ��ֱ���ھ�
���������Ⱥ��ڶ����Ȼ�����ͬʱ���ɽ��ھ���������ھ���������ϣ����������ֱ�� �ھ��ڵ���Ҫ�����Ⱥ����ƶ��ھ����ֱ��ȫ�����꣮
�� �����߲����ھ�
�ھ������߲�ʱ����ʹ�ھ�ĵ�һֱ�߲��ֳ����ڶ�ֱ�߲��������ߣ�Ȼ�����ھ� ����ʹ�ڶ�����ǰ�ںõĺ������νӣ������ھ���͵Ĺ���Ϊ�����Σ�ת�䴦Ϊ���ǣ���� ��Ҫ����ʱ���ھ�����谴�����뾶�����߲��ϵ����ھ������ھ���ҵ�ʵͣ�һ�� ��Ӧ���ã�
�� ��������ϲ����ھ�
�ھ�����ϲ�ʱ�����ݵ��οɴ����˻�һ�˰��궨�߿��ڣ�ֱ�������ܼ����ھ�Ϊֹ�� Ȼ���ھ���������ٳ� �� �� °ͣ���ڹ����������ϣ��Ӳ�������ھ���ͼ 7a ��ʾ����� ���ھ�����빵�������ߣ��Ӻ��ھ�ʣ�ಿ�֣���ͼ 7b ��ʾ��
�� �������ػ����ھ�
�� ��С�ͽ����ػ����ھ�
�ھ�С�ͽ����ػ��ɲ��ö����ھͲ����ھ�
�� �� �������ھ����ڽ����ػ���һ����������ж��������²��ã��ӵ����������ھ���ؽ����ػ�������һ�˵��������һ�˿�����ҵλ�ã��Ӷ��濪ʼ�ھ�
�����ھ�ɲ���ϸ�ڷ�����ڷ���
·ϸ�ڷ������������ھ����ھ���õ����ķ���ͣ�ڽ����ػ���һ�࣬����������λ �ڽ����ػ�һ����ߵ��ڲ࣬�����ƽ�У�����һ�����룬��ʹ�ڶ����������ߣ����������������ػ������ھ��ڳ�������ж���������ߵ�һ�࣬һ ֱ�ڵ������ػ��������Ϊֹ��Ȼ���ھ��������һ����ͬ���ķ����ھ� �� �� �� ������ʱ�� ������ٵ�����һ���ھ��һ���ھ� �� �� �� ����������˶�εص����������ػ����꣮��� �����ػ���խʱ��Ӧ���� �� �� �� �� �� �� �� ��˳������ھ���������ػ��Ŀ��ȳ��� �� ��ʱ�� ��������һ�࣮�� �� �� �� �� �� �� �� �� �� ��������һ�ࡣ�����ھ��ص����ܽ����ֵ��� ���ڳ����Ծ���ʽ�������ɡ������ڻ�е�ƶ�Ƶ����Ӱ����ҵ�ʡ��ڹ�������̫�غ������� Ա�Ƚ��ٵ�����£��ɲ��ô����ھ���
·���ڷ������ھ��ͣ�ڽ����ػ��м䣬��ʹ�����������뽨���ػ����������غϣ����� �����������ھ��ڳ�������ж�ڽ����ػ������ָ����λ�á���һ�������������ֱ�ߵ� �������ڵڶ��������棬��Ҫע�����һ�����������ӣ�ֱ������Ϊֹ������ �ھ��ܳ�ַ��ӻ�е����ҵЧ�ʣ�����������������Ҫ�϶���˹��������ڹ��������� ��������Ա�������£��ɲ��ô����ھ��������ھ��������������ֻ����һ��ж��ʱ�� �ھ����˳�Ž����ػ������߿�ж��һ�����У�������������ж������ �����������ж���������ҵЧ�ʡ�
�� �� �������ھ��ھ���ɽ����ػ����濪�ڣ�������������²��ã��ٽ����ػ��Ķ��� С���ھ���ھ�뾶�ܹ�һ���ھ�������ػ��Ķ��棬������ֻ��һ��ж��ʱ���õ������ھ� �����ڽ����ػ�����Ͽ��������ھ���ھ�뾶���ھ��ֻ���ؽ����ػ��������ʱ����˫ �����ھ��������˫�����ھ����ػ���
�Ӳ����ھ����ػ�ʱ���ھ��Ӧͣ���ڿӵ�һ������ϣ���е���ֿɴ�ֱ�ڻ�ƽ���ڽ� ���ػ������߷��á�
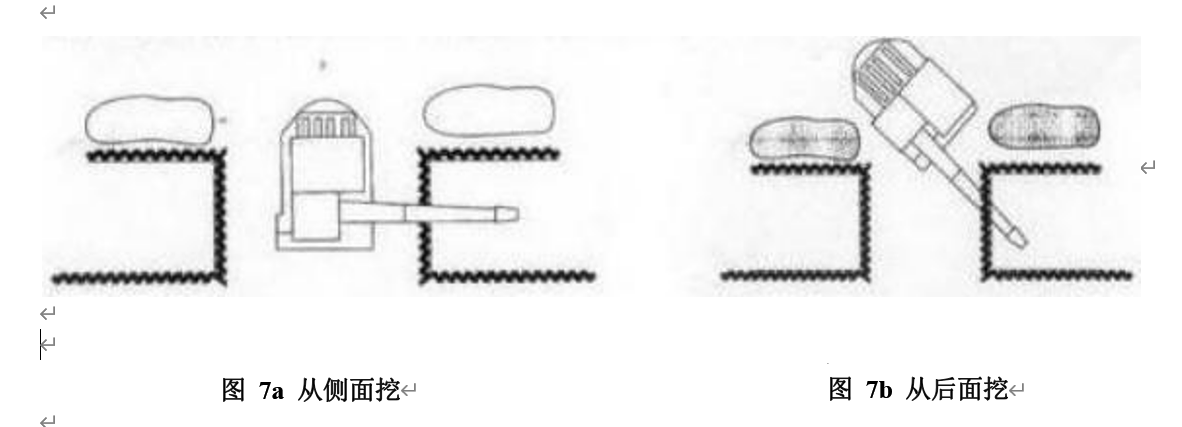
�� �����ͽ����ػ����ھ�
���ͽ����ػ����ھ�ɲ��÷�������װ�õķ������У������ǵ��ھ��м�� �� ��ʱж�������ѣ�����������������ھ��ж���������Ƴ������ػ��������⡣���䱸������ ���������˳����Բ�Ӱ��ڣ��ε��ھ�
�� �����ͽ����ػ����ھ�
���ͽ����ػ����ھ��Ը�����������ö��г̵ķ�ʽ�ͷֲ��ھ�ﵽ������档�ھ�
ʱ�����Ե�����ҵ��Ҳ���Զ��ͬʱ��ҵ�������ǵ�������ͬʱ��ҵ��������������ͬ���� �Ļ�е�������ʵʩ��
�� �� �����г̵��ھ�Ҫ�����ػ�����ѷ�������λ��Ҫ�����ؽ����� ������ �� �ھ�����������������������������������Զ�����Բ�Ӱ�쿪�� �� �� �� ���档�ھ� ��ҵʱ���ھ��������������ȡ�ؽ����ػ����ģ���ǰ�����ʻ������ҵλ�ã��ھ�������� ���ѷ��� �� �� ��λ���ϣ�Ȼ�������������������ػ������Զ����Ϊ�������ҵЧ�ʣ��ھ� ����������Ӧע��Эͬ������ʼ�ھ��һ�������ѷ��ڽ����ػ����Ҳ࣬��һ��ѷ������ʱ�� �������������Ҳ����������ν�����п��ں��������������ַ�����ҵ���ھ��ʼ����90° ��Χ��ѭ�������������˹���ѭ��ʱ�䣬��ҵ�ʿɵõ���ߡ�
�� �� ���ֲ��ھ����ͽ����ػ�����ھ��һ���ھ��ܴﵽ�������ʱ���ɲ��÷� ���ھ�ķ����ﵽ������ȣ���ͼ 11b ��ʾ��
�ֲ��ھ�Ĵ��������ݴ��ͽ����ػ�����Ⱥ��ھ�����ھ���ȶ�����һ��ɷ� �� �㡫 ��
�㼴�������ھ����ػ���ȵ�Ҫ�����Ƿ������ھ�һ�㰴�������ּ����г̵��ھ� �����С�����ӵ���Ҫƽ���������������Խ���·��ҵ����д���ƽ��ʱ���ɸ��ݵڶ���Ҫ�� �ڵĶ��棬�����ּ����г̼������ڡ�����������г��ھ�ʱ���ھ������ͣ���� �� �� �� ֮�䣬 ��ж����ͣ�� �� �� ��֮�䡣�ھ����һ������ǰ������һ���ڵ� �� ��Ԥ����ȺͿ��ȡ������� ���ݶ��漴���ڵ����賤��ʱ���ھ����Ӧ��С���Ա㹹��б�£�������һ������ҵ�������� �� �� �Ķ���ʱ���ھ��ͣ���� �� �� ��֮�䣬 ��ж����ͣ�� �� ��λ���ϡ�������ҵ�������ھ����90 °��Χ��ѭ��������ѭ��ʱ��̣���ҵЧ�ʽϸߡ�ͬʱ������ �� ����ʱ���ڶ��������� �ܸߣ����ɽ�����װ�ڳ��ڣ���ʡʱ�䣬�����������ҵЧ�ʡ���� �� �Ľ���·�����ھ� ������Ҫ��
�� ��ƽ�������ػ����β���
�ھ���ͽ����ػ�ʱ��Ϊ�˼��ٹ������ͱ��ڻ�е�����ڿ���ͨ�У�����Ҫ���ƽ��Ӳ�� ���棬���ֹ���һ���������������ɣ���û�����������ʱ�������ھ��ƽ����ѹʵ��
�� �� ��ƽ����ѹʵ��ƽ�������ػ���һ���ѶȽϴ����ҵ��ƽ���Ĺؼ��Ǵ�ۺͶ��˵��� ����ϣ���֤�ڶ����ص���ƽ���ƶ���ʹ�ڶ������ڳ����ڿӵ�����������ֲ��ƻ���Ӳ�ĵ� �档�����Ҫ���ǣ�ǰ���ڶ��½���ۣ�ʹ�������½Ӵ����棻 ���ն��˺�������ۣ�ʹ�ڶ� ˮƽ�ƶ���
���ն��˵�Ŀ�ģ������ڶ�����ɢ���������ھ��������£���ڳ����ڵ�������㡣���� ��۵�Ŀ�ģ����DZ�֤�ڶ�����ƽ��ƽ���ƶ�����ˣ�������Ա��ƽ��������Ҫʱ��ע��� ��λ�ã������ݲ��ײ�������ʱ��Ҫ��ʱ�����ڶ��߶ȡ������ֶ������ƽ����������ʱ��Ҫ ��ʱ������ۣ��綷��λ�ø�������߶�ʱ��Ҫ��ʱ�Խ���ۣ�ʹ�����ƽ�����������涷�˾����λ�õĸߵͶ��������Ӷ���֤�ڶ��ص�ƽ��ƽ���ƶ���
���ն��˹����У��緢���ڶ�ǰ���ѻ��϶�������������Ϻ������ʱ��Ҫ��ʱ�ն��ڳ��� ��ע���ھ����ȣ���Ҫ�ƻ�Ӳ��ƽ�棬����Ӧ��������ѹʵ��
ѹʵ����ʱ��Ҫ���ջض���ʹ�䴹ֱ����ʹ����ƽ���ŵأ�Ȼ���½���ۣ������������� ѹʵ�������������Ϻ�Ҫ�ֲ������ֲ�ѹʵ��һ���������һ�㲻����30cm����ѹʵ�� ��ʱ���м��ó���ķ�����ʵ��
�� �� ���ν����ػ����£����ھ���ͽ����ػ���һ��ز����ٵ���ҵ������ҵǰ���� ���ֱ�����Ϥ�¶�Ҫ���Ǻ�ʩ���������������¶����壬��Ԥ�������¶�����ߣ��Ա��� ʩ����������ʱ��顣
�α��£�Ҫ���ݱ��µ���dz���ھ����������ѡ���ھ����ͣ��λ�á����õ����ν� ��ı���ʱ������װ�ã��ڶ��������쵽�ӵ���µ����أ�Ӧ���ھ��ͣ���ڱ��µ��ϱߣ� �����µ��ϰ벿�֣�Ȼ���ƶ��ھ�����ӵף������µ��°벿�֣���������䵽���ڵ� ������ʹ�ӵ�ƽ����������̨�ھ����ͬһ������ı���ʱ����̨�ھ��Ҫ�ֱ���ڱ��µ� �ϱ��غͿӵף������ϱߵ��ھ�����ϰ벿�֣��±ߵ��ھ�����µ��°벿�֣��������� ���ӵ��ڵ���������֤�ӵ�ƽ������dz�ı���ʱ������װ�ã��ڶ���Ӧ���쵽���µ��ϱ��أ� �ھ��Ҫ���ڿ��ڣ��ڶ��������¹��ޡ�
�α��µ�Ҫ����ƽ�������ػ�������ͬ������Ӧע�����붷�˵���ϣ�ȷĿ��� �ĸ߶ȣ�ʹ���ܰ��¶������Ҫ���Ρ����εĹ��������нϺ������ʱ���ɿ������ڣ��� ������������ӽ��¶�Ҫ��ʱ��Ҫdz�ڡ����ڣ��Ա�ȷ�شﵽ�¶�Ҫ��
�� ���ھ�װ��
�ھ���ھ�װ��ʱ��Ӧ���ھ����ػ��ķ������С�
�� �� ����������������ҵ�档�����һ��װ�����������ȹ���ʹ��ת�Ƕ���Ӧ���ӣ� �������ȹ�С����ʹ�ھ����λ�������ࡣ
�� �� ���ھ��������Ҫ�ʵ�������ʱӦ���÷ֲ��ھ�����̫��ʱ��Ӧ����������£ �����Ѻ��ٽ���װ����ҵ��
�� �� ��ע�ⰲȫ�������ھ������ж��������ײ��