
实验七、双摇杆机构
一、实验目的1、了解双摇杆机构的装配及其运动特性。
2、训练学生的工程实践动手能力,培养学生的创新意识及综合设计的能力。
3、加深学生对平面机构组成原理的理解。
二、实验原理
任何平面机构可以用零自由度的杆组依次连接到原动件和机架上去的方法来组成,这是机构的组成原理,也是本实验的基本原理
三、实验设备及功能
1)实验台机架
实验台机架如图2所示:机架中有5根铅垂的活塞杆,它们可沿X轴左右移动,固定靠六角头螺钉和蝶型螺母固定。需移动时请先将蝶型螺母松开,双手推动活塞杆.并尽可能使它保持垂直状态。活塞杆上的滑块可沿Z轴上下移动,用内六角螺钉将滑块紧定在活塞杆上。(注意:在移动立柱或滑块时需用直尺或卷尺量出它们的相对位置再把螺钉拧紧。)
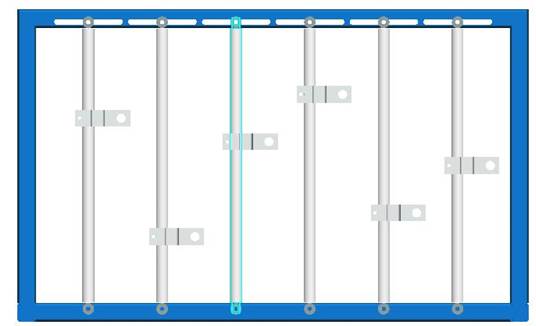
图2 机架
2)其它组件
| 序号 | 名 称 | 示 意 图 | 规 格 | 数量 | 备 注 |
|
1 |
主动轴带轮 |
 |
1 | ||
|
2 |
电机轴带轮 |
 |
1 | ||
|
3 |
主 轴 |
 |
2 | ||
|
4 |
小 齿 轮 |
 |
Z=20 | 1 | |
|
5 |
大 齿 轮 |
Z=50 | 1 | ||
|
6 |
连 杆 |
|
L=350 | 1 | |
|
7 |
连 杆 |
|
L=250 | 1 | |
|
8 |
连 杆 |
|
L=200 | 1 | |
|
8 |
隔 套 |
|
T(厚度)=2 | 4 | |
|
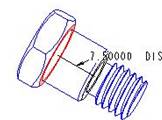
9 |
销 轴 螺 钉 |
 |
L=14.2 | 4 | |
|
10 |
隔 套 |
|
T(厚度)=4 | 1 | |
|
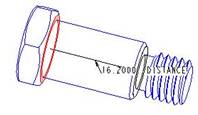
11 |
销 轴 螺 钉 |
 |
L=16.2 | 1 | |
|
13 |
螺 钉 套 |
 |
T(厚度)=24 | 2 | |
| 14 |
从 动 轴 |
 |
2 | ||
|
15 |
端 盖 |
 |
3 | ||
|
16 |
卡 环 |
 |
2 |
提供M5平头螺钉、M3圆头螺钉、内六角扳手一套,1m卷尺一把,开口扳手1个。
四、实验台装配图及爆炸图
装 配 图

实验八、牛头刨床机构
一、实验目的
1、了解牛头刨床机构的装配及其运动特性。
2、训练学生的工程实践动手能力,培养学生的创新意识及综合设计的能力。
3、加深学生对平面机构组成原理的理解。
二、实验原理
任何平面机构可以用零自由度的杆组依次连接到原动件和机架上去的方法来组成,这是机构的组成原理,也是本实验的基本原理
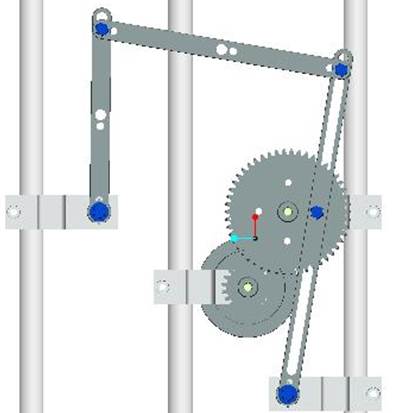
1、牛头刨床机构
结构说明及工作特点:如图1所示,牛头刨头的动力是由电机经皮带、中间部分为曲柄导杆,曲柄整周运动带动导杆摆动,刨刀(导杆滑块)作往返直线运动,从而完成刨削工作。
三、实验设备及功能
1)实验台机架
实验台机架如图2所示:机架中有5根铅垂的活塞杆,它们可沿X轴左右移动,固定靠六角头螺钉和蝶型螺母固定。需移动时请先将蝶型螺母松开,双手推动活塞杆.并尽可能使它保持垂直状态。活塞杆上的滑块可沿Z轴上下移动,用内六角螺钉将滑块紧定在活塞杆上。(注意:在移动立柱或滑块时需用直尺或卷尺量出它们的相对位置再把螺钉拧紧。)
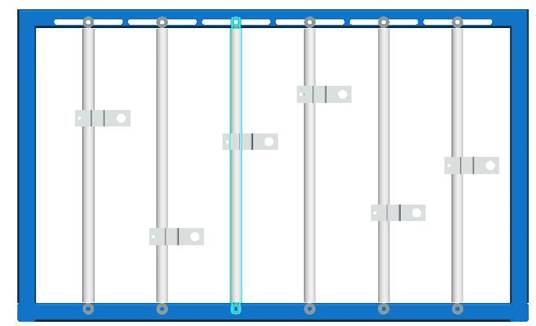
图2 机架
2)其它组件
| 序号 | 名 称 | 示 意 图 | 规 格 | 数量 | 备 注 |
|
1 |
主动轴带轮 |
 |
1 | ||
|
2 |
电机轴带轮 |
 |
1 | ||
|
3 |
主 轴 |
 |
2 | ||
|
4 |
小 齿 轮 |
 |
Z=20 | 1 | |
|
5 |
大 齿 轮 |
Z=50 | 1 | ||
|
6 |
连 杆 |
|
L=350 | 2 | |
|
7 |
T 滑 块 |
 |
1 | ||
|
8 |
隔 套 |
|
T(厚度)=2 | 2 | |
|
9 |
销 轴 螺 钉 |
 |
L=14.2 | 2 | |
|
10 |
隔 套 |
|
T(厚度)=4 | 1 | |
|
11 |
销 轴 螺 钉 |
 |
L=16.2 | 1 | |
|
12 |
销 轴 螺 钉 |
 |
L=7.5 | 2 | |
| 13 |
从 动 轴 |
|
3 | ||
|
14 |
螺 钉 套 |
 |
T(厚度)=17 | 2 | |
|
15 |
螺 钉 套 |
 |
T(厚度)=31 | 1 | |
|
16 |
端 盖 |
 |
3 | ||
|
17 |
卡 环 |
 |
2 |
提供M5平头螺钉、M3圆头螺钉、内六角扳手一套,1m卷尺一把,开口扳手1个。
四、实验台装配图及爆炸图
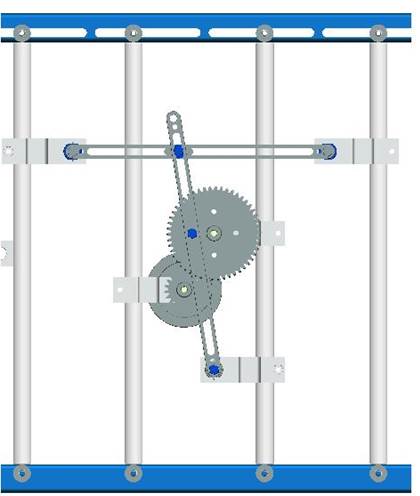
图3 装配图

图4 爆炸图
五、实验方法与步骤
⑴机构分析
①测绘时使测绘的机构缓慢地运动,从原动构件开始仔细观察机构运动,分清各运动单位,确定原动件、机架、传动部件和执行部件。从而确定组成机构的构件数目,运动副的数目。
②根据联接构件间的接触情况及相对运动的性质,确定各个运动副的种类。
③要选择最能表现机构特征的平面作为视图平面。
④在稿纸上徒手按规定的符号及构件的联接次序逐步画出机构运动简图的草图。然后用数字1、2、3 …… 分别标出各构件,用A、B、C …… 分别标出各运动副。
⑤仔细测量机构各运动尺寸(如转动副间的中心距、移动副导路的位置),对于高副则应仔细测出高副的轮廓曲线及其位置,然后以适当的比例做出机构运动简图
⑵绘制机构运动简图的步骤
①搞清机械的实际构造、动作原理和运动情况,
②沿运动传递路线,逐一分析每两个构件之间相对运动的性质,确定运动副的类型和数目。
③恰当选择运动简图的视图平面,通常选择机械中多数构件的运动平面为视图平面。
④选择恰当的作图比例尺。
⑤确定各运动副的相对位置,用各运动副的代表符号、常用机构运动简图符号和简单线条,绘制机构运动简图。
⑥在原动件上标出箭头以表示其运动方向。