
工业机器人作为先进制造业中不可替代的重要装备和手段,已成为衡量一个国家制造业水平和科技水平的重要标志。我国正处于加快转型升级的重要时期,以工业机器人为主体的机器人产业,正是破解我国产业成本上升、环境制约问题的重要路径选择。产业的发展急需大量高素质高级技能型专门人才,人才短缺已经成为产业发展的瓶颈。目前,工业机器人技术专业经教育部批准后已成为热点技术专业,分别是高职的"工业机器人技术"专业;中职的"机电技术应用(工业机器人方向)。
对于工业机器人技术专业,重在培养应用型人才,而具体到教育方面,则应以培养工业机器人调试工程师和操作及维护人员为主要目标,使学生具有扎实的工业机器人理论知识基础、熟练地工业机器人操作能力和丰富地工业机器人编程调试经验。为此,将从硬件建设、软件应用、教学资源建设三个方面为重点,三维一体为学校建设工业机器人实训中心。
工业机器人实训中心是专门以工业机器人为核心的技术应用实训中心。所有平台均以实际工业级应用为基础,对实际工业现场设备进行提炼和浓缩,结合机电类、自动化类、先进制造类行业、自动化应用的特点,融光、机、电、气于一体,并针对科研培训活动进行专门设计与产品功能优化。通过训练,能强化使用者对工业机器人技术及应用、视觉的检测和应用、机器人工作站的设计、安装、接线、编程、调试、故障诊断与维修等综合职业能力,使学生掌握更多的工业机器人典型应用的工艺知识及编程调试,仿照实际工件加工的过程用到的典型工作站,让学生掌握工件加工过程中所涉及到的工业机器人工作站的工艺,学生掌握的技能更加全面,学生就业的方向更加宽泛。适合机电类、自动化类相关专业的科研和实训,同时也适合工程技术人员上岗培训。
工业机器人实训中心的建设完全满足开设工业机器人技术应用专业,适应培养高素质、复合型人才培养的需求,通过教学、实操训练可以为企业培养大量自动化高层次人才,避免将来人才缺乏的问题。同时我们会将实验室建设成一个实验教学体系合理、开放共享、特色鲜明、培养高素质人才的重要平台,期望达到水平一流的工业机器人实验教学示范中心。
二、项目建设内容
(一)工业机器人工程应用实训室
工业机器人搬运系统集成工作站
产品主要组成及参数
| 序号 | 名 称 | 规格及说明 | 数量 | 单位 |
| 1 | 实训平台 | 由基础训练区和模拟应用区组成,材质:结构件材料铝型材。 | 1 | 台 |
| 2 | 六自由度工业机器人 | 六自由度工业机器人ER3-600。 | 1 | 套 |
| 3 | 模拟上下料模块 | 模拟实际机床上下料。 | 1 | 套 |
| 4 | 轨迹训练模块 | 具有TCP校点和三角形、圆形、方形、空间、多线段教学轨迹功能。 | 1 | 套 |
| 5 | 搬运码垛模块 | 包含物料和码垛两个平台。 | 1 | 套 |
| 6 | 安全防护 | 装有安全光栅,保证人身安全 | 1 | 套 |

1、工业机器人系统
1)动作类型:多关节型;
2)最大活动半径:≥590mm;
3)手部最大负载(第6轴):≥3KG
4)机器人重量:≤27kg;
5) 控制轴数≥6轴;
6)驱动方式:交流伺服驱动;
7) 重复定位精度:≤±0.02mm;
8) 轴运动:轴动作范围
J1回转轴≥+170°~ -170°
J2立臂轴≥+ 85°~ -135°
J3横臂轴≥+ 185°~ - 65°
J4腕轴≥+ 190°~ - 190°
J5腕摆轴≥+ 130°~ - 130°
J6腕转轴≥+ 360°~- 360°
9)轴运动速度:
J1回转轴≥375°/s
J2立臂轴≥300°/s
J3横臂轴≥419°/s
J4腕轴≥460°/s
J5腕摆轴≥460°/s
J6腕转轴≥600°/s
10)示教盒:尺寸≤6寸彩色液晶
11) 机器人本机、控制系统、驱动、电机为同一国产知名品牌。
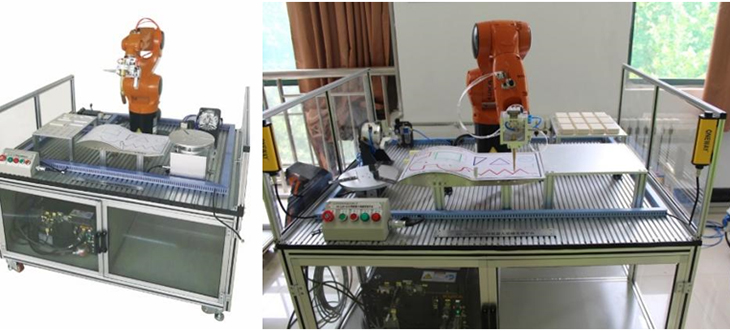
2、工业机器人实训平台
平台由模拟焊接模块、模拟上下料模块、搬运码垛模块和轨迹训练模块组成,机器人通过执行末端工具完成相应的动作。台架尺寸1500mm×1200mm×750mm,装有安全光栅,如人手无意中越过安全光栅,机器人立即停止工作,保障人身安全。

a)框架为高强度铝型材结构,台架四周采用优质钢板封闭,表面喷涂处理。
b)实训台装有按钮和指示灯,分别为"启动"、"停止"按钮和指示灯,并且带一个急停按钮。
c)台面为铝型材结构,包含T型槽方便于安装机器人或其它执行机构。
d)实训台装有万向轮,方便移动。
3、实训平台操作系统
3.1、机器人多功能实训夹具

使用多功能实训夹具的优点是只需要通过变换机器人手爪姿态即可实现对模拟应用环境的模拟操作与编程,外形尺寸:120*120*180mm,重量2KG;具备吸紧工件实现码垛功能;实现夹持物料模拟上下料的功能,同时具有轨迹画笔。
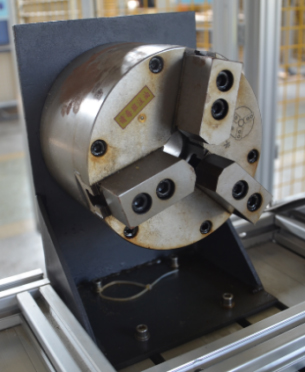
3.2、模拟上下料模块
该工作站模拟实际工厂中的机床上下料,由气动三爪卡盘、固定支架、气动手爪和物料架组成,让学生更精准的掌握轨迹练习,了解机床上下料工艺流程。
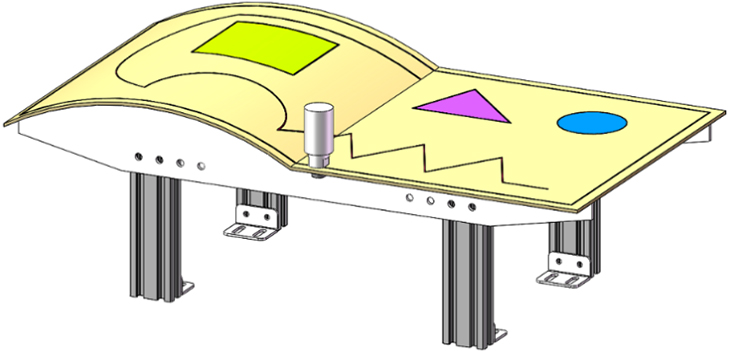
3.3、空间轨迹训练模块
模块整体台架材料为优质铝型材,一体画板由不锈钢板制成,表面覆盖PVC膜;具有TCP标定工具,可实现机器人工具TCP标定练习;实现基本轨迹编程练习,提供三角形、矩形、圆形及多线段图形,训练不同的编程指令,实现在平面及空间复杂教学轨迹。
3.4、搬运码垛模块
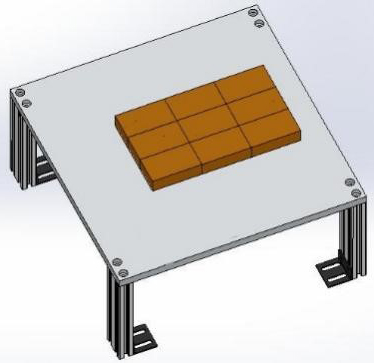
本单元由铝板和铝型材组合制成,尺寸为300*200*150mm;码垛料块为尼龙材质外形尺寸为80*40*20,可根据实验要求码垛多种形式。
可码垛的形状:


3.5、气泵
为实训设备提供足够的气源,气泵输出功率/转速:550W/1400r/min,启动压力(运行中):0.45mpa(0.1~0.8pa可调)噪音: ≤65dB静音、低噪音无油空压机。

4、安全光栅

产品特性:
① 全程自检,采用国际先进技术;
② 抗震性好,性能稳定;
③ 高分辨率,可保护手掌、人体;
④ 安装方式简单多样;
⑤ 光轴对光容易;
⑥ 抗光、电磁干扰强;
⑦ 低功耗设计;
⑧ 响应时间短,可靠性高;
⑨ 体积小巧。
5、配置清单
| 序号 | 名称 | 品名、规格 | 单位 | 数量 | |
| 1 | 实训平台 | 材质:结构件材料铝型材。 | 硕博 | 套 | 1 |
| 2 | 机器人系统 | 机器人本体 | ER3-600 | 台 | 1 |
| 机器人控制器 | 埃夫特 | 台 | 1 | ||
| 机器人示教器 | 埃夫特 | 个 | 1 | ||
| 3 | 模拟上下料模块 | 气动卡盘 | 硕博 | 个 | 1 |
| 气动手爪 | 硕博 | 个 | 1 | ||
| 物料 | 硕博 | 个 | 2 | ||
| 电磁阀 | 4V310-08 | 套 | 1 | ||
| 4 | 轨迹训练模块 | TCP标定尖锥 | 硕博 | 个 | 2 |
| 轨迹平台 | 硕博 | 个 | 1 | ||
| 铜质浮动式划线笔 | 硕博 | 个 | 2 | ||
| 5 | 模拟搬运码垛模块 | 码垛平台 | 硕博 | 个 | 1 |
| 码垛工件 | 硕博 | 个 | 10 | ||
| 真空吸盘 | ZPT25HBNJ10-B01-A18 | 套 | 1 | ||
| 真空发生器 | ZH05B-01 | 套 | 1 | ||
| 电磁阀 | 4V210-08 | 套 | 1 | ||
| 6 | 气泵 | 硕博 | 每实训室1台 | 台 | 1 |
| 7 | 安全防护 | 安全光栅 | 保证人身安全 | 套 | 1 |

智能交互机器人
| 名称 | 详细技术参数 | ||
| 操作系统、处理器、内存特性 | |||
| 项目 | 备注 | ||
| 操作系统 | android(6.0) | ||
| 语言支持 | 中文 | ||
| 处理器类型 | RK3399模组 | 双Cortex-A72+四Cortex-A53 大小核CPU结构,主频最高达1.8GHz | |
| 内置时钟 | RTC | ||
| 内存DDR | 4g LPDDR3 | ||
| 内建NAND FLASH | 32GB/EMMC | ||
| USB调试口 | micro usb接口 | usb2.0 | |
| 开机按键1 | 开机键 | ||
| 急停按键 | 一键停键 | 解除电机电源供电,机器人为推动轮子还是能动 | |
| 显示屏 | 13.3寸TFT分辨率1920*1080edp接口 | ||
| 13寸触摸屏 | 13.3寸电容感应式触摸 | ||
| MIC | 6MIC拾音,采用科大讯飞 | ||
| 外置 I/O 端口 | 1个 USB 2.0 (MICROUSB) | ||
| 摄像头 | USB300万像素 | 可选 | |
| 身份证识别器 | 串口协议模组 | 可选 | |
| 打印机 | USB协议模组打印机 | 可选 | |
| 扬声器 | 2*8Ω/5W单声道喇叭。 | ||
| 无线技术AP6210 | 支持2.4 WIFI&BT4.1 802.11b/g/n无线局域网, | ||
| ROS导航规格 | |||
| 操作系统 | LINUX | ||
| 处理器类型 | 导航主机电脑主板赛杨PCBA | ||
| 硬盘 | 32G高速固态硬盘 | 读写速度快,抗震动干扰 | |
| 电机驱动 | 5.5寸轮毂电机 | ||
| 陀螺仪 | 9 轴高精度姿态传感器 | ||
| 单线激光雷达 | 激光波长905 nm工作区域270度 | ||
| 4G路由器转2.4GWIFI | 4GCPE-M6 | 可选 | |
| 一体超声波 | DYP-ME007YY-RM01_V1.0 | ||
| WIFI模组 | 支持2.4 WIFI&BT4.1 802.11b/g/n无线局域网, | ||
| MCU胸腔电源板 | 左右手舵机电源,手指舵机电源,点头舵机电源,打印机电源,CLASS D类功放、串吕 | ||
| 主MCU电源板 | 电源板输出12V,5V,/最大输出电流5A,3.3V输出1A、电机控制电路、串口 | ||
| 电池类型 | 电池组10S8P 容量10400 mAh/37V | ||
| 电池使用时间 | 6小时-8小时 | ||
| 充电方式 | 自动回充、DC直充 | 机器人自动回充电桩充电、或者直接插适配器充电 | |
| 充电桩参数 | 过流保护、智能断电、输出额定电压:42VDC,输出额定电流:2A | 默认状态下充电桩是断电状态,只有在机器人回充的时候才会打开电源,防止其他意外情况 | |
| 电源适配器 | 输入:AC100-240V.50-60HZ, 输出: DC42V 3A | ||
| 产品重量 | 40Kg、40Kg、含包装 | ||