
机械手控制
一、实训目的
1.使学员理解PLC基本结构与组成,熟悉PLC的控制原理;
2.掌握PLC编程软件的使用及操作技巧;
3.掌握PLC与力控(PCAuto3.1)的操作与应用
二、实训器材
1.FX-2N-48MR PLC 1 台
2.PC电脑 1台
3.SC-09编程电缆线 1条
4.力控软件(PCAuto3.1) 1套
三、控制要求
机械手控制系统包括两种工作方式:手动和自动。初始状态:“上升、下降、左移、右移、夹/松”指示灯为OFF,开关“上/下、左/右、光/电”为ON,“夹/松”为OFF,原点指示灯为ON。
自动:将“自动/手动”开关置ON,“连续”置OFF,按下启动按钮后,系统完成一个周期的运行,停在初始状态,若要继续运行,需再次按下启动按钮。流程如下: “初始状态—启动按钮—下降—夹紧—延时2秒—上升—右移—下降—放松—上升—左移—初始状态”
连续:将“自动/手动”和“连续”开关置ON,按下启动按钮后,系统完成一个周期的运行,停在初始状态,延时2秒,系统自动进入下一个周期的运行。运行过程中,按下停止按钮,系统完成当前周期的运行,停止在初始状。流程如下: “初始状态—启动按钮—下降—夹紧—延时2秒—上升—右移—下降—放松—上升—左移—初始状态—延时2秒—下降……”。
手动:将“自动/手动”开关置OFF,机械手根据不同的命令完成相应的动作
流程如下: 初始状态—“上/下”置OFF— 下限—“夹/紧”置ON—“上/下”置ON—上限—“左/右”置OFF—右限—“上/下”置OFF—下限—“夹/紧”置OFF—“上/下”置ON—上限—“左/右”置ON—左限—初始状态
四、 组态中PLC I/O口及辅助继电器分配
| 输入点 | 辅助继电器 | 控制功能 | 输出点 | 输出设备 | 功能 |
| X0 | M300 | 启动按钮 | Y0 | 机械手 | 原点指示 |
| X1 | M301 | 停止按钮 | Y1 | 机械手 | 上升指示 |
| X2 | M302 | 上限 | Y2 | 机械手 | 右移指示 |
| X3 | M303 | 下限 | Y3 | 机械手 | 下降指示 |
| X4 | M304 | 右限 | Y4 | 机械手 | 左移指示 |
| X5 | M305 | 左限 | Y5 | 机械手 | 夹紧/松开指示 |
| X6 | M306 | 光电 | |||
| X7 | M307 | 复位 | |||
| X10 | M310 | 上移/下移 | |||
| X11 | M311 | 夹紧/松开 | |||
| X12 | M312 | 左移/右移 | |||
| X13 | M313 | 自动 | |||
| X14 | M314 | 手动 | |||
| X15 | M315 | 连续 |
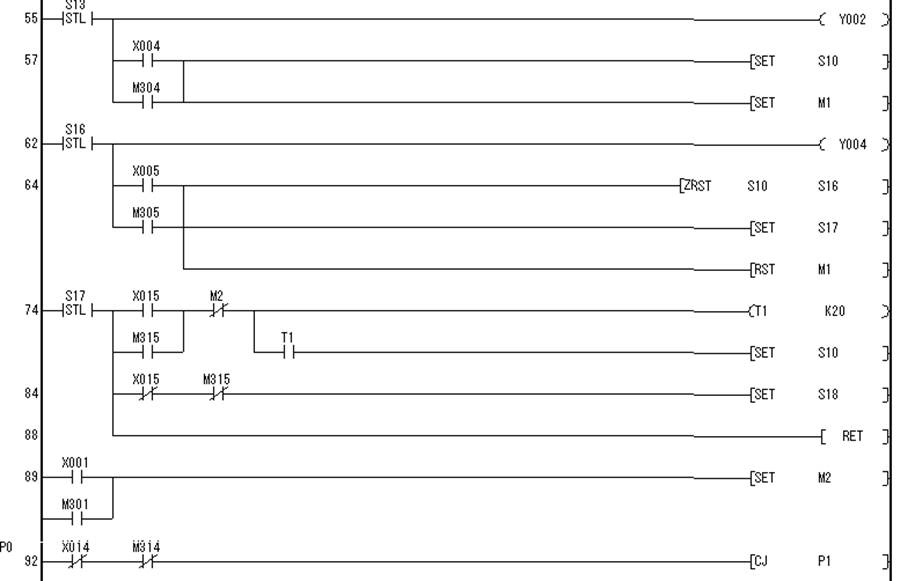
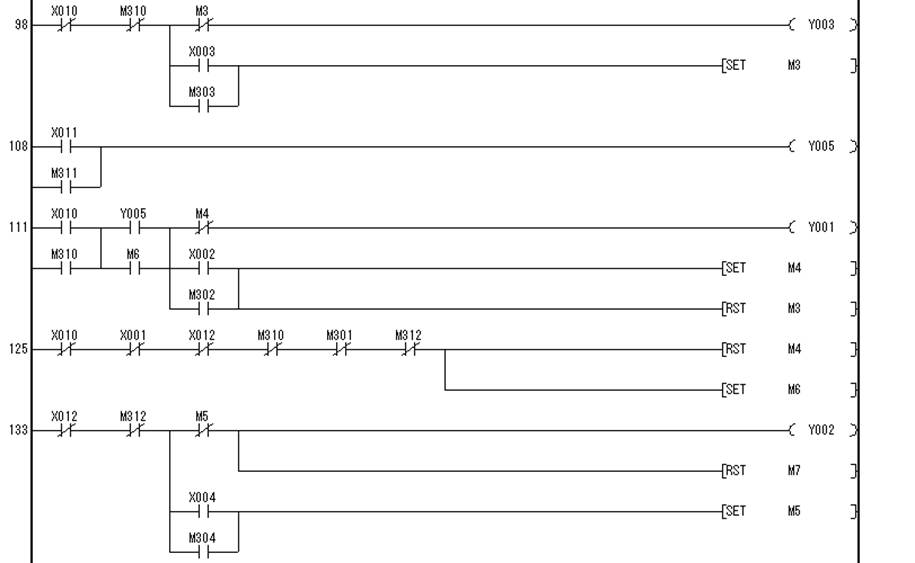
五、梯形图


六、实训步骤
1.连接编程电缆
2.接通PLC电源
3.打开编程软件FXGP-WIN
4.组态仿真软件
(1) 组态实训界面
见下页
(2) 组态软件的操作步骤
1.确认PLC相关步骤已完成,相关实训组态界面已打开
2.端口定义(一般按默认值)
3.操作达到考核进程要求即可
5.实训现象及考核评分
本实训主要目的是了解机械手的的工作过程
第一步:首先单击自动按钮,然后启动按钮,机械手将向下运动 得分:17分
第二步:到达下限位置时,机械手夹紧物体 得分:33分
第三步:夹紧物体后向上运动 得分:50分
第四步:到达上限位置时,手臂向右平移 得分:67分
第五步:到达右限位置时,手臂向下运动 得分:83分
第六步:到到下限位置时,松开物体 得分:100分