工业机器人拆装工作站,工业机器人拆装工作站及仿真系统
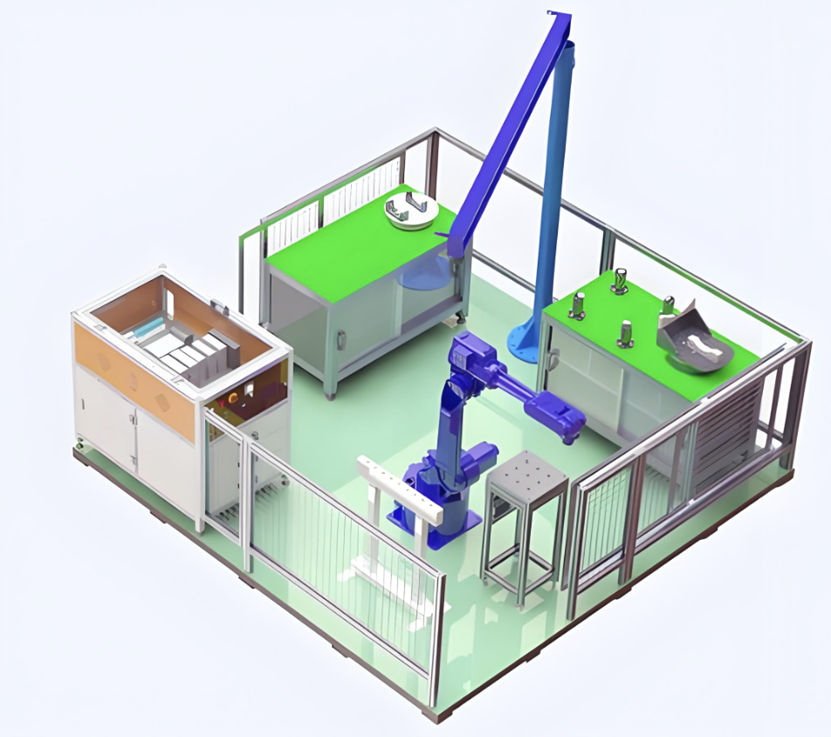
2024-04-30 06:56 工业机器人拆装工作站是一个针对工业机器人设备而设立的机械硬件拆装与维护的一体化工作站。其主要目的是让学生或技术人员深入了解工业机器人的机械结构和动作原理,掌握其拆装、维护和检修技能。
具体来说,工业机器人拆装工作站会包含真实的工业机器人设备,例如ABB工业机器人,或者发那科机器人整体拆装平台、安川工业机器人系统等。在这些工作站中,学生或技术人员可以学习工业机器人的本体(包括机械外壳、伺服电机、减速器、皮带等)以及附属装置(包括线路、气路及其控制装置等)的拆装与维护。
在拆装过程中,学生或技术人员需要熟悉并掌握各种工具的使用方法,如内六角扳手、预置扭力扳手、工业听诊器、悬臂吊车等,以实现对工业机器人本体及附属装置的有序拆卸、检修和记录,然后再进行有序的装配。通过这些实践操作,他们可以深入了解工业机器人的内部构造、工作原理和常见故障的排除方法。
工业机器人拆装工作站不仅为学生提供了宝贵的实践机会,帮助他们掌握专业知识和技能,同时也为社会培养了工业机器人安装、维护、检修及开发等技术人员,为机器人行业的发展提供了有力的人才支持。

工业机器人的拆装是一个复杂且需要专业技能的过程,涉及到对机器人各个部分的仔细拆解和组装。以下是关于工业机器人拆装的一些基本步骤和注意事项:
准备工作:
确保操作环境安全,避免发生意外伤害。
戴上符合规定的个人防护装备,如安全帽、护目镜、防护手套等。
对机器人进行停机和断电操作,确保操作的安全性。
做好相关的备份工作,如备份程序、文件等,以便后续的装配工作。
拆卸过程:
拆卸外壳:工业机器人拆装需要先拆卸外壳,外壳使用螺丝固定,需要使用专门工具进行卸除。
拆卸电路板:在拆卸完外壳并确定完全断电之后,需要拆卸电路板。电路板上会有很多连接器需要拆卸,这个过程需要使用专业工具和技能。在拆卸之前,需要将相关连接信息记录好,便于后续组装使用。
标记和记录:在拆装过程中,需要对拆下的零部件进行标记,可以使用标签、贴纸等方式,清晰地标记出零部件的名称、位置等信息,以便后续的组装工作。同时,还需要做好相关记录工作,包括拆下来的零部件的型号、数量、状态等信息,以便后续的维护保养工作。
注意结构和位置:在拆装工作中,需要了解机器人的结构和位置,避免误操作或损坏其他部件。可以使用专业的搬运工具和仓库设施,确保零部件的安全和整洁。
组装过程:
组装过程与拆卸过程相反,需要按照拆卸时记录的连接信息和标记,将零部件正确地组装回原位。
在组装过程中,同样需要使用专业工具,并确保所有连接都牢固可靠。
测试与调试:
在完成组装后,需要对机器人进行测试和调试,以确保其能够正常工作。
可以使用各种测试仪器和工具,如万用表、示波器等,对机器人的电路和控制系统进行测试。
同时,还需要对机器人的运动性能进行测试,确保其能够按照预定的轨迹和速度进行运动。
注意事项:
在整个拆装过程中,必须严格遵守安全操作规程,确保人身安全和设备安全。
拆装工作应由具备专业技能的人员进行,避免由不具备相关知识的人员进行拆装工作。
对于不同的工业机器人型号和品牌,其拆装方法和步骤可能有所不同,因此在进行拆装工作前,必须仔细阅读相关的操作手册和说明书,确保正确操作。


四、实训项目
1、工业机器人基本操作与示教编程
2、工业机器人本体拆卸工艺认知
3、工业机器人本体装配工艺认知
4、工业机器人关键零部件的基本结构认知
5、工业机器人装配精度测试和调整
6、工业机器人控制系统调试和维修
7、工业机器人电气接线工具认识与使用
8、工业机器人关键零部件及电气元器件认知
9、机器人控制系统参数设置
10、机器人电控系统电气系统故障排查和维护
具体来说,工业机器人拆装工作站会包含真实的工业机器人设备,例如ABB工业机器人,或者发那科机器人整体拆装平台、安川工业机器人系统等。在这些工作站中,学生或技术人员可以学习工业机器人的本体(包括机械外壳、伺服电机、减速器、皮带等)以及附属装置(包括线路、气路及其控制装置等)的拆装与维护。
在拆装过程中,学生或技术人员需要熟悉并掌握各种工具的使用方法,如内六角扳手、预置扭力扳手、工业听诊器、悬臂吊车等,以实现对工业机器人本体及附属装置的有序拆卸、检修和记录,然后再进行有序的装配。通过这些实践操作,他们可以深入了解工业机器人的内部构造、工作原理和常见故障的排除方法。
工业机器人拆装工作站不仅为学生提供了宝贵的实践机会,帮助他们掌握专业知识和技能,同时也为社会培养了工业机器人安装、维护、检修及开发等技术人员,为机器人行业的发展提供了有力的人才支持。
工业机器人的拆装是一个复杂且需要专业技能的过程,涉及到对机器人各个部分的仔细拆解和组装。以下是关于工业机器人拆装的一些基本步骤和注意事项:
准备工作:
确保操作环境安全,避免发生意外伤害。
戴上符合规定的个人防护装备,如安全帽、护目镜、防护手套等。
对机器人进行停机和断电操作,确保操作的安全性。
做好相关的备份工作,如备份程序、文件等,以便后续的装配工作。
拆卸过程:
拆卸外壳:工业机器人拆装需要先拆卸外壳,外壳使用螺丝固定,需要使用专门工具进行卸除。
拆卸电路板:在拆卸完外壳并确定完全断电之后,需要拆卸电路板。电路板上会有很多连接器需要拆卸,这个过程需要使用专业工具和技能。在拆卸之前,需要将相关连接信息记录好,便于后续组装使用。
标记和记录:在拆装过程中,需要对拆下的零部件进行标记,可以使用标签、贴纸等方式,清晰地标记出零部件的名称、位置等信息,以便后续的组装工作。同时,还需要做好相关记录工作,包括拆下来的零部件的型号、数量、状态等信息,以便后续的维护保养工作。
注意结构和位置:在拆装工作中,需要了解机器人的结构和位置,避免误操作或损坏其他部件。可以使用专业的搬运工具和仓库设施,确保零部件的安全和整洁。
组装过程:
组装过程与拆卸过程相反,需要按照拆卸时记录的连接信息和标记,将零部件正确地组装回原位。
在组装过程中,同样需要使用专业工具,并确保所有连接都牢固可靠。
测试与调试:
在完成组装后,需要对机器人进行测试和调试,以确保其能够正常工作。
可以使用各种测试仪器和工具,如万用表、示波器等,对机器人的电路和控制系统进行测试。
同时,还需要对机器人的运动性能进行测试,确保其能够按照预定的轨迹和速度进行运动。
注意事项:
在整个拆装过程中,必须严格遵守安全操作规程,确保人身安全和设备安全。
拆装工作应由具备专业技能的人员进行,避免由不具备相关知识的人员进行拆装工作。
对于不同的工业机器人型号和品牌,其拆装方法和步骤可能有所不同,因此在进行拆装工作前,必须仔细阅读相关的操作手册和说明书,确保正确操作。
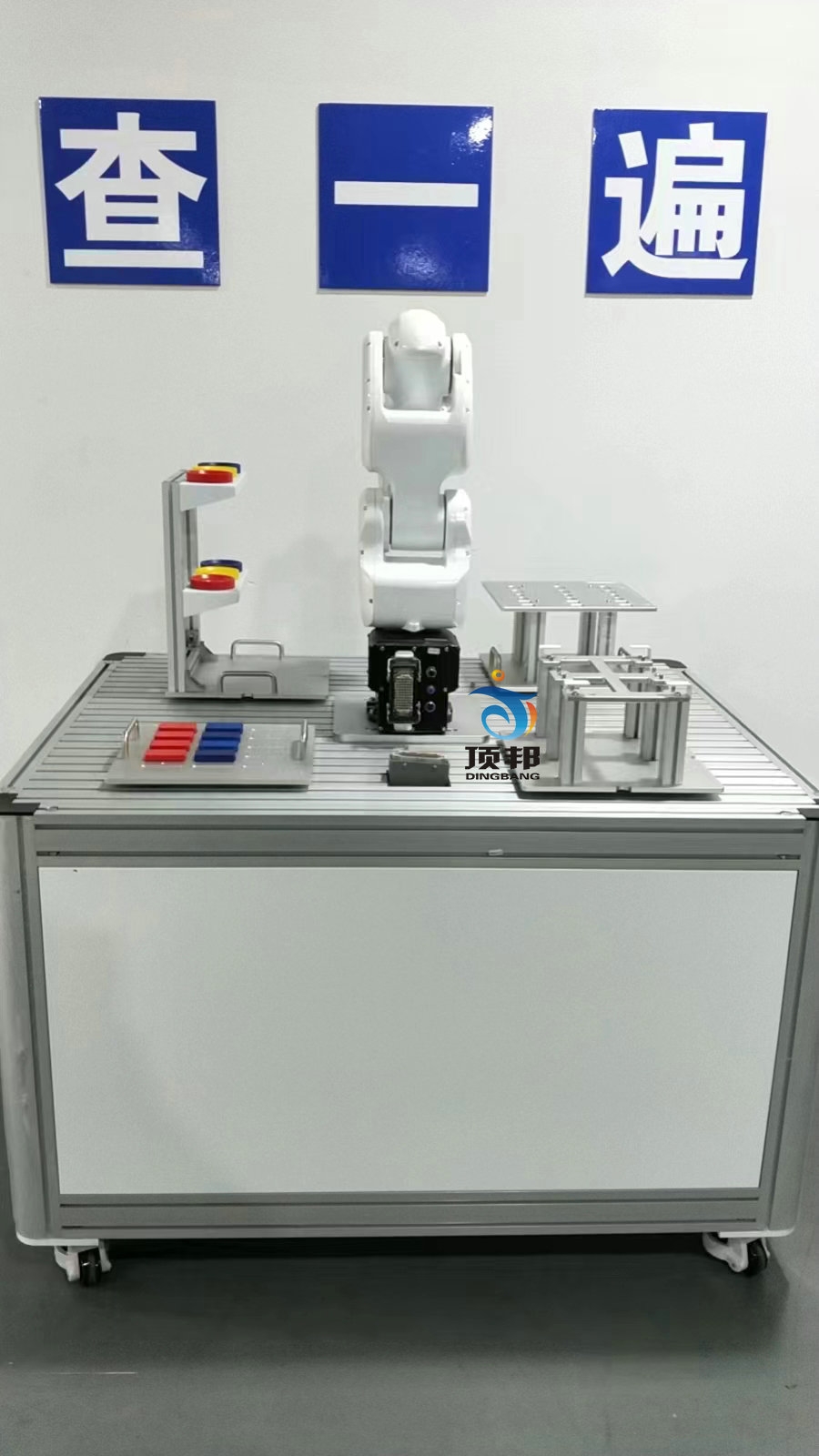
DB-JQR15 工业机器人拆装实训装置
一、简介
工业机器人拆装实训装置学生可以通过其学习机器人电气关键零部件的工作原理,掌握常用工业机器人的机械结构装配方法,包括本体、减速机、电机及其本体线束的装配。通过实训后学生能基本形成工业机器人的结构理论体系。常用电气件(开关/按钮/断路器/接触器)工作原理、电气接线图识图、电气接线、机器人控制系统故障排除、机器人示教程序和用户PLC程序设计等技能。
工业机器人拆装实训装置学生可以通过其学习机器人电气关键零部件的工作原理,掌握常用工业机器人的机械结构装配方法,包括本体、减速机、电机及其本体线束的装配。通过实训后学生能基本形成工业机器人的结构理论体系。常用电气件(开关/按钮/断路器/接触器)工作原理、电气接线图识图、电气接线、机器人控制系统故障排除、机器人示教程序和用户PLC程序设计等技能。
二、主要功能
1、机械方向:工业机器人电气系统拆装实训平台集成六轴机器人拆装工程模块,通过该工作站学生可基本掌握常用工业机器人的机械结构装配方法,包括本体、减速机、电机及其本体线束的装配。通过实训后学生能基本形成工业机器人的结构理论体系,在工业机器人领域的进一步学习和发展奠定扎实基础。
2、电气方向:工业机器人电气系统拆装实训平台主要把机器人IPC控制器、IO模块、交流伺服驱动器、示教器、伺服电机等电气核心零部件集成到平台来进行展示与教学。学习机器人电气关键零部件的工作原理、常用电气件(开关/按钮/断路器/接触器)工作原理、电气接线图识图、电气接线、机器人控制系统故障排除、机器人示教程序和用户PLC程序设计等技能。
三、配置清单
1、机械方向:工业机器人电气系统拆装实训平台集成六轴机器人拆装工程模块,通过该工作站学生可基本掌握常用工业机器人的机械结构装配方法,包括本体、减速机、电机及其本体线束的装配。通过实训后学生能基本形成工业机器人的结构理论体系,在工业机器人领域的进一步学习和发展奠定扎实基础。
2、电气方向:工业机器人电气系统拆装实训平台主要把机器人IPC控制器、IO模块、交流伺服驱动器、示教器、伺服电机等电气核心零部件集成到平台来进行展示与教学。学习机器人电气关键零部件的工作原理、常用电气件(开关/按钮/断路器/接触器)工作原理、电气接线图识图、电气接线、机器人控制系统故障排除、机器人示教程序和用户PLC程序设计等技能。
三、配置清单
| 序号 | 产品名称 | 规格参数 |
| 1 | 轻量化拆装机器人 |
手腕负载:额定3kg最大4kg 最大工作半径:540mm 自由度:6 关节速度: J1 370°/s J2 370°/s J3 430°/s J4 300°/s J5 460°/s J6 600°/s 关节范围: J1±170° J2±110° J3+40°/220° J4±185° J5±125° J6±360° 重量:≤25kg 工作温度:0-40℃ 本体全透明化设计,可直接观察到内部各个部件的运动过程及原理。 |
| 2 | 拆装实训台 | 防静电拆装一体化实训台主体由铝型材焊接而成,两侧安装喷塑钢板,下方配置推拉式抽屉,用于放置机器人拆装工具,整体结构牢固美观,便于机器人的拆装维护及示教编程作业。防静电拆装一体化实训台尺寸:≥1250*1000*820 mm。 |
| 3 | 机器人控制系统 |
采用EtherCAT总线技术,兼容IEC61131-3标准,支持各类EtherCAT模块;基于X86 IPC+RTOS设计,支持六关节自由度机器人、SCARA机器人、五轴机器人、连杆码垛机机器人、四轴多关节机器人、DELTA机器人、直角坐标机器人、多轴专用机器人等多种机器人的控制。 自带上下料、码垛、焊接、焊缝跟踪、视觉、激光切割、传送带跟踪、碰撞检测、拖拽示教等多种通用工艺,并可根据用户需求进行定制;同时提供完整API接口,用户可根据需求高效、方便地自主开发专用工艺(PApp)与专用工艺界面(PUI)。 控制器:处理器:X86 4核 2.0G 内存:4G 存储空间:16/32G 控制轴数:标准:6轴垂直关节机器人 可选配:1轴地轨、2轴辅助轴变位机、3轴龙门架 控制伺服:EtherCAT,Sercos III,CANopen,TSN 接口:数字I/C接口,16路输入/16位输出(可扩展) 4路-10~+10V模拟量输出,12位精度(选配,可扩展) 8路-5~+5或0~10V模拟量采集,12位精度(选配,可扩展) 机器人专用端子接口,防碰撞、电机报闸,报警控制等 操作模式:示教模式、离线编程、远程模式 编程方式:示教编程、离线编程、拖动示教 运动功能:点到点、圆弧、样条曲线、直线横摆、轨迹平滑 指令系统:运动指令、逻辑指令、输入输出指令、运算指令 位置控制方式:点到点控制、连续轨迹控制 坐标系统:关节坐标系、机器人坐标系、工具坐标系、用户坐标系 结构算法:4轴SCARA 4轴冲压机械手 6轴垂直多关节 4轴连杆码垛 4轴直角坐标机器人 客制化专用机器人 应用:装配、点胶、焊接、喷涂、码垛、切割、抛光打磨、搬运等 电源:24V 60W(控制器功率30W,示教盒30W) |
| 4 | 工业机器人快换组件 |
外形尺寸(长×宽×高) 300*300*200 mm 工位数量 2个 铝材支架主要由铝型材搭建而成,其表面配套定位装置。工件放置在实验支架的定位装置中,机器人示教再现进行样件的搬运作业。铝材支架上面固定四处尖针,以便进行TCP标定验证。 机器人末端配置气动手爪工具,用于夹取样件进行搬运、装配、编程、实操等实训作业。 |
| 5 | 码垛模块 |
外形尺寸 (长×宽×高) 300*300*60 mm 安装形式 适配标准实训台定位安装 零件容量 矩形工件15个。 |
| 6 | 装配模块 |
外形尺寸:(长×宽×高)300*300*178mm 安装形式 适配标准实训台定位安装 可容纳零件个数18个 排列形式 3行6列 装配模块设置有装配顺序,可拓展RFID功能。 |
| 7 | 立体仓库模块 |
外形尺寸(长×宽×高) 300*300*420 mm 安装形式 适配标准实训台定位安装 仓储容量 6 兼容工件种类 2种 |
四、实训项目
1、工业机器人基本操作与示教编程
2、工业机器人本体拆卸工艺认知
3、工业机器人本体装配工艺认知
4、工业机器人关键零部件的基本结构认知
5、工业机器人装配精度测试和调整
6、工业机器人控制系统调试和维修
7、工业机器人电气接线工具认识与使用
8、工业机器人关键零部件及电气元器件认知
9、机器人控制系统参数设置
10、机器人电控系统电气系统故障排查和维护