工业机器人拆装调试实训台,工业机器人实训操作台
2024-05-10 06:53 工业机器人的拆装调试是一个相对复杂的过程,涉及多个步骤和专业知识。
一、拆装过程
拆卸外壳:工业机器人拆装需要先拆卸外壳,外壳使用螺丝固定,需要使用专门工具进行卸除。在拆卸过程中需要格外小心,避免损坏机器人内部的关键部件。
断电:在拆卸工业机器人前需要彻底断电,关闭外部电源和机器人电源开关,避免拆卸时电路板和电缆出现意外问题。另外,拆卸过程中工具使用也需要注意安全,避免触电等危险情况的发生。
拆卸电路板:在拆卸完外壳并确定完全断电之后,需要拆卸电路板。电路板上会有很多连接器需要拆卸,这个过程需要使用专业工具和技能。在拆卸之前需要将相关连接信息记录好,便于后续组装使用。
二、调试过程
硬件调试:在重新组装机器人后,需要进行硬件调试。这包括检查各个部件是否正确安装,确保电路板和电缆没有损坏或短路。同时,需要检查机器人的电源和电机是否正常工作。
软件调试:软件调试是工业机器人调试的重要部分。在软件调试过程中,需要对机器人的控制程序进行测试,确保机器人能够按照预定的程序进行工作。这包括检查机器人的动作是否准确,传感器是否能够正常工作等。
功能调试:功能调试是确保工业机器人能够完成预定功能的关键步骤。在功能调试过程中,需要对机器人的各种功能进行测试,如抓取、码垛、搬运等。同时,需要调整机器人的参数和配置,以确保机器人能够满足实际需求。
在调试过程中,需要注意以下几点:
安全第一:在调试过程中,需要确保操作人员的安全。在机器人工作时,需要避免人员靠近机器人或接触机器人的运动部件。
逐步调试:在调试过程中,需要逐步进行调试,不要一次性进行过多的操作或修改。这有助于及时发现和解决问题。
记录信息:在调试过程中,需要记录相关的信息和数据,如调试步骤、测试结果等。这有助于后续的分析和解决问题。
一、拆装过程
拆卸外壳:工业机器人拆装需要先拆卸外壳,外壳使用螺丝固定,需要使用专门工具进行卸除。在拆卸过程中需要格外小心,避免损坏机器人内部的关键部件。
断电:在拆卸工业机器人前需要彻底断电,关闭外部电源和机器人电源开关,避免拆卸时电路板和电缆出现意外问题。另外,拆卸过程中工具使用也需要注意安全,避免触电等危险情况的发生。
拆卸电路板:在拆卸完外壳并确定完全断电之后,需要拆卸电路板。电路板上会有很多连接器需要拆卸,这个过程需要使用专业工具和技能。在拆卸之前需要将相关连接信息记录好,便于后续组装使用。
二、调试过程
硬件调试:在重新组装机器人后,需要进行硬件调试。这包括检查各个部件是否正确安装,确保电路板和电缆没有损坏或短路。同时,需要检查机器人的电源和电机是否正常工作。
软件调试:软件调试是工业机器人调试的重要部分。在软件调试过程中,需要对机器人的控制程序进行测试,确保机器人能够按照预定的程序进行工作。这包括检查机器人的动作是否准确,传感器是否能够正常工作等。
功能调试:功能调试是确保工业机器人能够完成预定功能的关键步骤。在功能调试过程中,需要对机器人的各种功能进行测试,如抓取、码垛、搬运等。同时,需要调整机器人的参数和配置,以确保机器人能够满足实际需求。
在调试过程中,需要注意以下几点:
安全第一:在调试过程中,需要确保操作人员的安全。在机器人工作时,需要避免人员靠近机器人或接触机器人的运动部件。
逐步调试:在调试过程中,需要逐步进行调试,不要一次性进行过多的操作或修改。这有助于及时发现和解决问题。
记录信息:在调试过程中,需要记录相关的信息和数据,如调试步骤、测试结果等。这有助于后续的分析和解决问题。
工业机器人拆装调试实训台
一、功能配置
工业机器人拆装调试实训台选用先进的6关节机器人,作为学生对工业机器人核心部件和机械结构的认知平台,从内部构成理解工业机器人的运动方式和动力传递,有助于机械相关学生通过真实设备消化理论知识,完善机械设计及运动控制的知识结构。
通过对6关节机器人本体的组装与拆解、装配与调试,学习机械的的工作原理与调试方法。通过机器人标定与测量,了解机器人特性,在实际应用中充分发挥机器人的性能。可以让学生掌握:机器人本体结构(包括基座、手臂、手腕)、熟悉谐波减速器(包括谐波减速器工作原理、结构、安装与维护)、机器人运动轴与坐标系(包括机器人主要技术参数、机器人运动轴的名称、机器人坐标系的种类、机器人自由度)、机器人基本术语与图形符号(包括机器人基本术语、图形符号)、机器人调试(包括机器人零位、机器人精度测试)。
提供三维拆装软件学习,高仿真建模,真实的还原机器人插装场景,并且包括工业机器人机械认知、原理认知、机械安装与调试、常见故障排查,故障维修等精选内容。学员可以反复练习,快速掌握机器人拆装技巧。
 (一)工业机器人拆装实训台
(一)工业机器人拆装实训台
操作台采用升降形式设计,桌体采用优质铝型材搭建,台面采用工业铝型材拼接并铺设防撞垫,底面用于放置机器人本体散件。
拆装实训台技术参数
(二)六自由度工业机器人
(四)机器人本体器件认知
提供机器人本体所有器件的规格书,包括机器人本体尺寸图,电机规格书、谐波减速机规格书等。可以认识机器人内部结构,比如机器人关节的结构组成,不同关节的设计差异。了解各关节的谐波减速机特性与参数。以及各关节电机的选型要求。
(五)机器人本体拆装与调试
通过本体的拆装与调试可以学习机器人结构原理、装配、生产现场安装、调试、故障排查及维护教学等。
本体可以拆装到螺钉级,并提供拆装散件的实物图。配置详细的“工业机器人本体拆装手册”和全流程视频教程,详细介绍各部分的机械安装、拆解过程,以及注意事项 。
装配好的机器人本体,可进行电气调试,调试各关节的安装是否良好。并可进行关节零位标定,标定后的机器人提供较高的轨迹精度
(六)机器人三维设计学习
提供全套的机器人本体设计3D资料,采用STEP格式。学生可以学习机器人本体设计,也可以在原来的3D文件基础上,根据需求进行修改,开发自己的机器人本体结构。并把设计文件加工成实际的机械零件,DIY动手装配自己的机器人本体。
二、机器人校准测试模块
校准测试模块主要由输送校准模块、轨迹标定模块、立体仓储模块组成。机器人本体拆装完成后,可进行编程、调试、校准功能。可根据机器人程序进行测试安装的本体是否合格。
(一)输送校准模块

输送校准模块供料可以进行单一的上料或进行组合上料,并且可对上料速度快慢进行控制。安装在型材实训桌上,用于传输工件,工件在运送过程中,机器人可根据运行速度、工件属性等条件进行工件输送,体现工业机器人的智能处理与精确位置的标定功能
l 输送校准模块技术参数
(二)轨迹标定模块

配备轨迹标定板,用于在规定的程序中进行轨迹检验
标定板采用铝合金表面阳极喷砂氧化形式制造,尺寸250mm×150mm,包含三角形、S型、方形、长方形、圆形轨迹。
(三)立体仓储模块

模块基体采用铝板搭建,安装在型材实训桌上,可放置装配、抛光的组件,设置分类放置的工件料库。
三、拆装工具车
每个拆装工作台区域设置一个监控摄像头,可将学生的整个拆装过程进行全程摄录,作为学生的数据库,统计学生的操作过程是否正确,是否规范。
视频资源可随时提取与截取,进行微课教学及资源库整合,完成精品微课的资提取、结构框架清晰、现场效果明确的资源库。
l 液晶屏幕技术参数
安全防护栏采用优质铝型材搭建,中间部分为黄色网格。
l 安全防护栏技术参数
工业机器人拆装调试实训台选用先进的6关节机器人,作为学生对工业机器人核心部件和机械结构的认知平台,从内部构成理解工业机器人的运动方式和动力传递,有助于机械相关学生通过真实设备消化理论知识,完善机械设计及运动控制的知识结构。
通过对6关节机器人本体的组装与拆解、装配与调试,学习机械的的工作原理与调试方法。通过机器人标定与测量,了解机器人特性,在实际应用中充分发挥机器人的性能。可以让学生掌握:机器人本体结构(包括基座、手臂、手腕)、熟悉谐波减速器(包括谐波减速器工作原理、结构、安装与维护)、机器人运动轴与坐标系(包括机器人主要技术参数、机器人运动轴的名称、机器人坐标系的种类、机器人自由度)、机器人基本术语与图形符号(包括机器人基本术语、图形符号)、机器人调试(包括机器人零位、机器人精度测试)。
提供三维拆装软件学习,高仿真建模,真实的还原机器人插装场景,并且包括工业机器人机械认知、原理认知、机械安装与调试、常见故障排查,故障维修等精选内容。学员可以反复练习,快速掌握机器人拆装技巧。
操作台采用升降形式设计,桌体采用优质铝型材搭建,台面采用工业铝型材拼接并铺设防撞垫,底面用于放置机器人本体散件。
拆装实训台技术参数
| 序号 | 名称 | 规格参数 |
| 1. | 外形尺寸 | 1200×500×800mm |
| 2. | 升降行程 | 800-1380mm |
| 3. | 升降助力形式 | 液压助力 |
| 4. | 桌体材质 | 6262+4040铝型材 |
| 5. | 桌面材质及规格 |
材质:工业铝型材 结构:拼接为一个整体,台面上布有T型槽,槽中心间距为20mm,可以使用M6快速拆卸的T型螺母和弹簧螺母块 |
| 6. | 防撞垫性能 | 采用3mm软玻璃PVC防水防烫防油免洗塑料透明防撞垫 |
| 1 | 品牌型号 | 六自由度工业机器人 | |
| 2 | 减速机 | 六关节谐波(J1,J2,J3,J4,J5,J6) | |
| 3 | 动作自由度 | 6 | |
| 4 | 最大负载 | 5kg | |
| 5 | 工作范围 | 940mm | |
| 6 | 手腕法兰面 | 80mm/8-M5均布安装螺纹孔 | |
| 7 | 最大范围 | J1 | ±180° |
| 8 | J2 | -100°~+90° | |
| 9 | J3 | -80°~+95° | |
| 10 | J4 | ±180° | |
| 11 | J5 | ±120° | |
| 12 | J6 | ±360° | |
| 13 | 最大运动速度 | J1 | 266°/s |
| 14 | J2 | 297°/s | |
| 15 | J3 | 300°/s | |
| 16 | J4 | 333°/s | |
| 17 | J5 | 500°/s | |
| 18 | J6 | 500°/s | |
| 19 | 重复定位精度 | ±0.05mm | |
| 20 | 本体重量 | 73kg | |
| 21 | 电源电压 | 220V | |
| 22 | 能耗 | 2.8KW | |
| 23 | 安装方式 | 地面安装,支架安装,倒置安装 | |
| 24 | 应用 | 装配、物料搬运、箱内堆叠等 | |
| 25 | 本体防护等级 | IP54 | |
| 26 | 电控柜防护等级 | IP54 | |
(三)机器人控制器
| 1 | 品牌型号 | 与六度自由工业机器人配套 |
| 2 | 控制示教器 | 8寸真彩触摸屏 |
| 3 | 模号的组成 | 一套模号中包含有一个主程序与 8 个子程序可根据实际情况对其进行选择使用。 |
| 4 | 编码器读取方式 | “脉冲”、“CAN”、“RS485”三种。 |
| 5 | 原点指令作用 | 可设置轴回原点的顺序机速度。 |
| 6 | 抱闸输出 | 输出电压DC 24V |
| 7 | 通讯功能 | 网络配置IP地址配选择通讯方式。 |
| 8 | 输入电源 | AC220V电源 50/60Hz |
| 9 | 温度 | <50℃ |
| 10 | 可完成实训 | 电机参数设定、结构参数设定、接线端口自行接线、驱动电缆接线等电气部分拆装实训内容 |
提供机器人本体所有器件的规格书,包括机器人本体尺寸图,电机规格书、谐波减速机规格书等。可以认识机器人内部结构,比如机器人关节的结构组成,不同关节的设计差异。了解各关节的谐波减速机特性与参数。以及各关节电机的选型要求。
(五)机器人本体拆装与调试
通过本体的拆装与调试可以学习机器人结构原理、装配、生产现场安装、调试、故障排查及维护教学等。
本体可以拆装到螺钉级,并提供拆装散件的实物图。配置详细的“工业机器人本体拆装手册”和全流程视频教程,详细介绍各部分的机械安装、拆解过程,以及注意事项 。
装配好的机器人本体,可进行电气调试,调试各关节的安装是否良好。并可进行关节零位标定,标定后的机器人提供较高的轨迹精度
(六)机器人三维设计学习
提供全套的机器人本体设计3D资料,采用STEP格式。学生可以学习机器人本体设计,也可以在原来的3D文件基础上,根据需求进行修改,开发自己的机器人本体结构。并把设计文件加工成实际的机械零件,DIY动手装配自己的机器人本体。
二、机器人校准测试模块
校准测试模块主要由输送校准模块、轨迹标定模块、立体仓储模块组成。机器人本体拆装完成后,可进行编程、调试、校准功能。可根据机器人程序进行测试安装的本体是否合格。
(一)输送校准模块
输送校准模块供料可以进行单一的上料或进行组合上料,并且可对上料速度快慢进行控制。安装在型材实训桌上,用于传输工件,工件在运送过程中,机器人可根据运行速度、工件属性等条件进行工件输送,体现工业机器人的智能处理与精确位置的标定功能
l 输送校准模块技术参数
| 1 | 模块尺寸 | 600mm*80mm*160mm |
| 2 |
光电传感器 (3只) |
发光源:红外光 检测距离:0-300mm 工作电压:12~24VDC 指示:360°LED指示 输出模式:NPN or PNP 保护电路:电源反接保护 响应速度:0.5ms Max 防护等级:IP66 |
配备轨迹标定板,用于在规定的程序中进行轨迹检验
标定板采用铝合金表面阳极喷砂氧化形式制造,尺寸250mm×150mm,包含三角形、S型、方形、长方形、圆形轨迹。
(三)立体仓储模块
模块基体采用铝板搭建,安装在型材实训桌上,可放置装配、抛光的组件,设置分类放置的工件料库。
| 1 | 仓位数量 | 9个(3层3列) |
| 2 | 仓位承重 | 2Kg |
| 3 | 外形尺寸 | 162×183×363mm |
| 4 | 定位装置 | 每个仓格有唯一的定位装置 |
| 5 | 工件材质 | 抛光件、焊接件等 |
| 序号 | 名称 | 详细描述 | 单位 | 数量 | 备注 |
| 1 | 预置式扭力扳手 |
 品牌型号:TG-25 扭力范围:5-25N·m; 分辨率:0.25 N·m; 长度:250mm;宽度:33mm;重量:0.34kg。 手柄:阳极氧化铝合金防滑滚花设计,不生锈不掉色; 刻度:激光镭射,清晰不掉色; 棘轮头:可正反双向报警; |
把 | 1 | |
| 2 | 内六角扳手 |
品牌型号:立昌 0803 90度直角弯折工艺弯曲到位,一次成型弯曲到位无反弹; 工业级S2钢整体锻造,整体热处理,硬度高扭矩大; 棱角接触面大,方便操作,不易打滑,更耐磨损; 喷水测试不生锈手感舒适,整体去毛刺处理,表面光滑平整; ABS塑壳,整体牢固,不易脱落,有对应插孔,不易损坏; 激光镭射打标工艺,清晰可见,使用方便; 可选配加力棒,操作更便捷。 |
套 | 1 | |
| 3 | 百分表 |
品牌型号:上工 CV-6CA 表头:量程0-10mm,分辨率0.01mm,表圈外径58mm。 测量灵敏准确,下轴套防水、防尘;双面读数;外圈滚花设计,调整表盘,转动轻松快捷;铜体铜芯结构,稳定耐用;加硬玻璃镜盖,防尘防划,读数清晰;可拆卸钢制测头,内嵌铜套设计;金属限位装置,带紧固螺丝,读数稳定准确;尺身带有编码,清晰可见; 表座:磁性表座,规格60kg,尺寸58*50*56,重量1 kg,工作磁力588N 对位夹表孔,可适应绝大部分的量表;金属摇杆搭配旋紧螺丝轻松控制表盘方向;带转向开关底座操作方便,采用稀土永磁材料,吸附能力强不易退磁; |
套 | 1 | |
| 4 | 直尺 |
品牌型号:得力 8461 规格50cm;长53cm,宽2.8cm。 采用2Cr13不锈钢制造,坚固耐用,耐磨耐摔;采用镭射刻字工艺整;文字采用两色印刷,双色标记,清晰耐磨,背面刻有公式换算表,便于查找核对;表面亚光处理、美观耐用、不易反光;尾端带悬挂孔方便收纳; |
把 | 1 | |
| 5 | 激光水平仪 |
 品牌型号:目博士 MBS-8969 激光波长:激光线和水平线激光波长635nm 下对点1*650nm; 自动安平方位:±3°超范围光线闪亮; 发射角度:120°; 水平精度:5m±1m; 垂直精度:5m±1m; 下对点精度:±+1mm/1.5m; 正交精度:±+1mm/3m; 线宽:2mm/5m; 工作环境:室内/室外; 电源:高容锂电池; 专业光线处理芯片,提升复杂环境的工作准度; 宝石级玻璃镜面,透光率强,硬度大,防刮性强; 机械摆锤一体化; 带强光点;自动安平;金属烤漆底座;搞震防水防摔;钟表级360°微调;180°水平线转换;EP电容触摸按键。 |
台 | 1 | |
| 6 | 螺丝拧紧力矩表 |
品牌型号:MXITA MT0.3-30Nm 扭力范围:0.3-30N;材质:铬钒合金钢;制式:公制;精度:±2%;最小分辨率0.1Nm(0.1lb-ft);preset:1;记忆数量:50;扭力单位:Nm lb-ft kg-m;mode:trace/peak;alert:led&buzzer;battery:2pcs*AAA;长度:75mm;重量120g;待机自动关机70s。 |
台 | 1 | |
| 7 | 周转箱 |
品牌型号:耐奉 315 尺寸:635*425*150; PE材料,绿色环保,无毒无味; 舒适把手设计,方便提拿; 可叠加设计,便于收纳,更好的利用空间;防滑设计,底部采用加厚网格设计,保护箱底不破损,具有防滑作用;加厚把手承重能力更强。 |
只 | 1 |
四、教学演示及实时监控纠正系统
本系统配置大屏显示和视频采集功能。通过将拆装实训台接入到大尺寸液晶显示系统中,可实现根据需要进行拆装视频观看、拆装仿真软件步骤操作等。每个拆装工作台区域设置一个监控摄像头,可将学生的整个拆装过程进行全程摄录,作为学生的数据库,统计学生的操作过程是否正确,是否规范。
视频资源可随时提取与截取,进行微课教学及资源库整合,完成精品微课的资提取、结构框架清晰、现场效果明确的资源库。
l 液晶屏幕技术参数
| 1 | 安装位置 | 不低于1.6米,按照人体工学结构设计,满足学生正常视角观看 |
| 2 | 安装支架 | 采用型材结构,立体设计,满足观看视角正常、安装牢固不晃动。 |
| 3 | 屏幕 | 55寸 4K 超高清屏 |
| 4 | 分辨率 | 3840*2160 |
| 5 | NTSC | 72% |
| 6 | 可视角度 | 178° |
| 7 | 刷新率 | 60Hz |
| 8 | CPU | Cortex A53 四核 高达1.5GHz |
| 9 | GPU | Mali-450 750MHz |
| 10 | HDR | HDR 10 和 HLG(Hybrid Log-Gamma) |
| 11 | 内存 | 2GB DDR |
| 12 | 闪存 | 8GB eMMC |
| 13 | 通讯功能 | 支持蓝牙、红外,无线wifi 双频 2.4/5GHz |
| 14 | 接口 | HDMI高清端口2个,USB接口2个,音频接口、以太网、AV、模拟信号等接口 |
| 15 | 格式支持 | 支持各类常规视频、音频格式。 |
l 监控摄像头技术参数
| 1 | 品牌 | 海康威视 |
| 2 | 型号 | DS-2DC2402IW |
| 3 | 电源 | DC12V 9W max |
| 4 | 工作温度和湿度 |
-10℃-50℃ 湿度小于90% |
| 5 | 防护等级 |
TVS 4000V防雷、防浪涌、防突波 符合GB/T17626.5四级标准 |
| 6 | 安装方式 | 多种安装方式可根据应用环境进行选择 |
| 7 | 聚焦模式 | 自动 |
| 8 | 信噪比 | 大于52dB |
| 9 | 焦距 | 2.8-6mm,2倍光学变倍 |
| 10 | 光圈数 | F1.8-F2.5 |
| 11 | 功能 |
水平范围:360度监控无死角 垂直范围:0-90度 支持比例变倍 300个预置点 巡航扫描8条 支持断电记忆功能 守望功能:预置点/巡航扫描 |
| 12 | 红外功能 |
红外照射距离:30m 支持Smart IR |
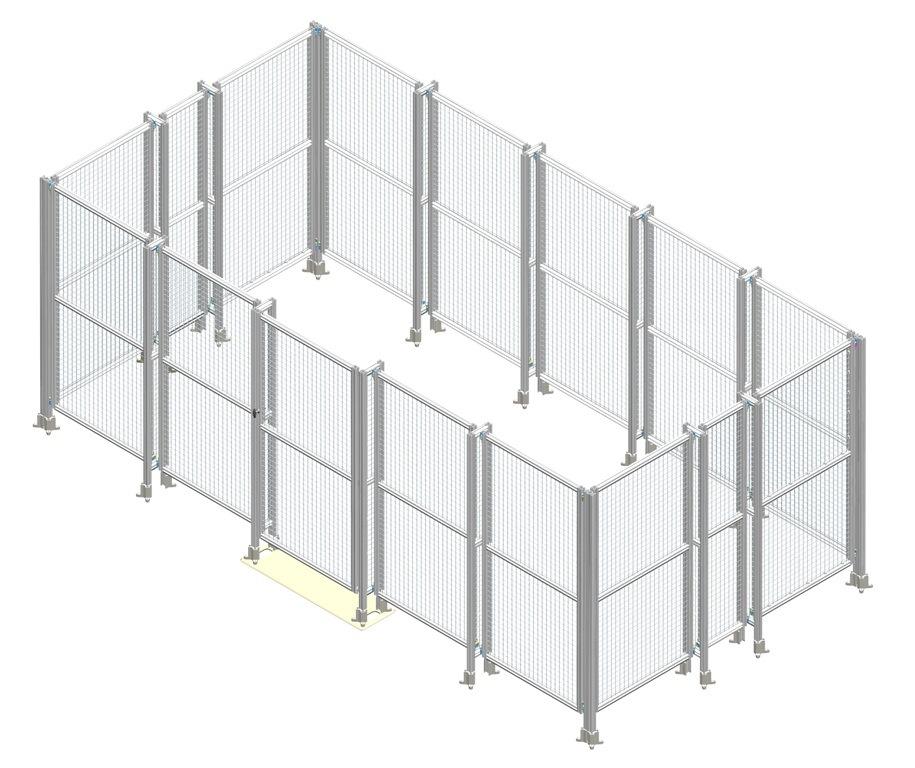
五、安全围栏
效果图
拆装实训区设置安全防护栏,将工作区域与安全区域有效隔离。工作区域内各工作站之间也均隔离开来。出入口为门式结构并配置安全锁,危险区域设置工业级安全光幕,有力保护人身安全。安全防护栏采用优质铝型材搭建,中间部分为黄色网格。
l 安全防护栏技术参数
| 1 | 高度 | 1.3米 |
| 2 | 材质 | 框架为优质工业铝型材,中间网格为优质抗剪切钢丝 |
| 3 | 网格丝径 | 4.0mm |
| 4 | 网格尺寸 | 60mm*60mm |