无人车平台,无人驾驶智能小车
2024-05-24 07:11 智能无人驾驶小车是当今科技领域的一项重要创新,它引领着汽车行业的未来发展。随着人工智能和感知技术的不断进步,无人驾驶小车正逐渐从科幻电影中走入现实生活。这一新兴技术将彻底改变我们对出行方式的认知,并给我们的生活带来巨大的便利。
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。智能无人驾驶小车是一款上海顶邦教育设备制造有限公司专为智能网联功能开发进行优化的轮式机器人,适用于巡检、智能驾驶、协同控制、计算机视觉、深度学习等技术的研究与应用。
智能无人驾驶小车是一款室内作业的机器人移动底盘,具有强通过、高负载、高精度、高扩展、动力足和续航长等特点,可跨平台开发,支持多种应用场景。智能无人驾驶小车采用四轮高精度差速底盘,上方搭载Mini电脑,前后单线激光雷达,深度相机,等传感器,同时预留4个以上usb口及一个网口,可以扩展多光谱,红外相机,机械臂等。
智能无人驾驶小车软件采用的是ubuntu18.04可视化系统。及ROS机器人框架,已经预先适配cartographer2D建图导航,location_fusion定位融合,teb_local_planner路径规划等功能包,可以实现自动驾驶,避障等功能。搭配全套传感器及导航软件,丰富的教程及资料,代码全部开源、极大降低了用户的使用门槛,用户可快速上手学习或二次开发。软件持续免费更新,也为用户提供更好的使用体验。

DB-WR01 智能无人驾驶小车

无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。智能无人驾驶小车是一款上海顶邦教育设备制造有限公司专为智能网联功能开发进行优化的轮式机器人,适用于巡检、智能驾驶、协同控制、计算机视觉、深度学习等技术的研究与应用。
智能无人驾驶小车是一款室内作业的机器人移动底盘,具有强通过、高负载、高精度、高扩展、动力足和续航长等特点,可跨平台开发,支持多种应用场景。智能无人驾驶小车采用四轮高精度差速底盘,上方搭载Mini电脑,前后单线激光雷达,深度相机,等传感器,同时预留4个以上usb口及一个网口,可以扩展多光谱,红外相机,机械臂等。
智能无人驾驶小车软件采用的是ubuntu18.04可视化系统。及ROS机器人框架,已经预先适配cartographer2D建图导航,location_fusion定位融合,teb_local_planner路径规划等功能包,可以实现自动驾驶,避障等功能。搭配全套传感器及导航软件,丰富的教程及资料,代码全部开源、极大降低了用户的使用门槛,用户可快速上手学习或二次开发。软件持续免费更新,也为用户提供更好的使用体验。
产品参数
| 无人车平台 |
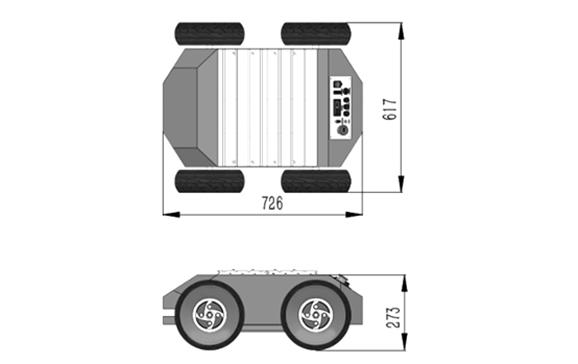
尺寸 726*617*273mm 轮距 535mm 轴距 386mm 净重 40kg 负载 50kg 电机数量 2个 电池 24v 磷酸铁锂电池 电池容量 20Ah 续航时间 4h 辅助电源 24v 最大速度 0.8m/s 驱动方式 四驱 转向方式 差速转向 垂直越障能力 8cm 爬坡能力 25° |
| 工控机 |
算力 100TOPS GPU 32个Tensor核心1024核 CPU 8核Arm Cortex-A78 2GHz 内存 16GB 128位LPDDR5 102.4GB/s 存储 512GB 视频编解码 H.265 PCIe 1X4+3X1 PCIe4.0 显示接口 HDMI2. 1 1x8K30DP 网卡 内置 I/O USB3.0/SCI/I2C/CAN/DMIC/ DSPK/I2S/GPIOs |
| 显示器 |
尺寸 13.3 英寸 比例 16: 9 分辨率 1920*1080 亮度 300 cd/m² 对比度 800: 1 触摸 否 |
| 多线雷达 |
线数 16 激光波长 905nm 激光安全等级 Class 1 人眼安全 测距能力 150m(90m@10% NIST) 盲区 ≤0.2m 精度(典型值) ±2cm(1m to 100m) ±3cm(0.1m to 1m) ±3cm(100m to 150m) 水平视场角 360° 垂直视场角 30°(-15°~+15°) 水平角分辨率 0.2°/0.4° 垂直角分辨率 均匀 2° 帧率 10Hz/20 Hz 转速 600/1200rpm (10/20Hz) 出点数 ~288,000pts/s(单回波) ~576,000pts/s(双回波) UDP数据包内容 三维空间坐标 反射强度 时间戳等 输出数据协议 UDP packets over Ethernet 时间同步 ≈ GPRMC with 1PPS,PTP&gPTP |
| 卫星接收机 |
通道 1408 通道 频点 5星多频 BDS、GPS、QZSS、GLONASS、Galileo 单点定位 (RMS) 平面 1.5m 高程 2.5m RTK(RMS) 平面 0.8cm+1ppm ;高程 1.5cm+1ppm 冷启动 <30s RTK 初始化时间 <5s( 典型值 ) 初始化可靠性 >99.9% 差分通讯方式 免DTU模块 差分数据 RTCM 3.X 数据格式 NMEA 0183 Unicore 定位测向数据更新率 20Hz 原始观测量数据更新率 20Hz 定向精度 (RMS) 0.1° /1m 基线 时间精度 (RMS) 20ns 速度精度 (RMS) 0.03m/s 双天线接口 SMA公头外螺内孔 * 2 通讯接口 USB-Type-C 供电接口 USB-Type-C/XT-30 供电电压 5-15V 功耗 2.4W 尺寸 93mmx69mmx37mm 重量 153g |
| 惯性导航系统 | 方位角测量范围:±180°(陀螺与磁方位可选)、测量精度(RMS)@25℃:<1.5°(无磁干扰条件下)、分辨率:<0.1° 、倾角测量范围:±500°/sec、测量精度(RMS)@25℃:<±0.5 °(动态)、<±0.2 °(静态)、分辨率:<0.1° 、陀螺仪测量范围:±180°(陀螺与磁方位可选)、零点偏差稳定性@25℃:<200 °/hr、分辨率:<0.1°/sec、宽带:>100Hz 、加速度计测量范围:±8G、分辨率:<10mg、宽带:>100Hz 、磁场计测量范围:±8gauss、分辨率:<2.5mgauss、宽带:14-17Hz |
| 高清相机 | 分辨率帧率 1920X1080, 30fps |
| 双目相机 |
视频输出:>2.2K@15fps,>1080p@30fps;>720p@60fps, 视野:>90°(H)x60°(V)x100°(D) RGB传感器类型;>1/3”4MP CMOS; 焦距:>2 . 8mm; 接口:USB 3.0端口; 深度范围:0.5-20m; 深度精度, <2%up to 3m;≤4%up to 15m; |
| 软件功能 |
功能: 键盘/手柄控制机器人运动; Cartographer2D/3D-SLAM建图/定位;。 Navigation导航包; TEB机器人局部路径规划器; 全局路径规划器: 多点路径导航包; RTK定位融合算法包; GPS循迹路径导航包; Simulation仿真模拟器 |