

| 序号 | 名称 | 参数 | 序号 | 名称 | 参数 |
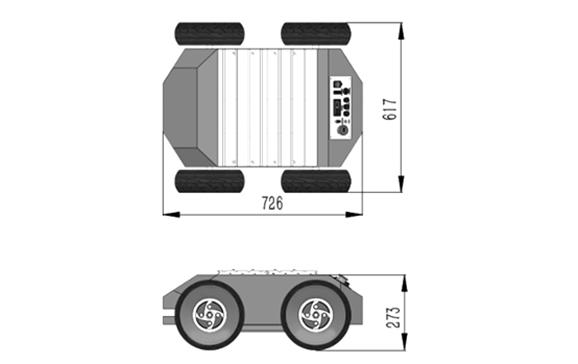
| 1 | 尺寸(长*宽*高) | 726*617*273mm | 13 | 驱动方式 | 4驱 |
| 2 | 轮距 | 535mm | 14 | 转向方式 | 差速转向 |
| 3 | 轴距 | 386mm | 15 | 控制板 | Stm32 |
| 4 | 净重 | 40kg | 16 | 通信接⼝ | USB串口 |
| 5 | 负载 | 直线50kg | 17 | 编码器精度 | 400线 |
| 6 | 电机数量 | 2 | 18 | PID控制频率 | 50Hz |
| 7 | 电机功率 | 24V250W | 19 | 适用地形 | 全地形 |
| 8 | 轮胎 | 10寸充气轮胎 | 20 | 垂直越障能力 | 8cm |
| 9 | 电池 | 24V DC磷酸铁锂电池 | 21 | 爬坡能力 | 25° |
| 10 | 续航时间 | 4小时 | 22 | 手柄控制 | 最大20m |
| 11 | 辅助电源 | 3*12V DC口 1*5V usb口 | 23 | 手柄通信 | 2.4Ghz |
| 12 | 最⼤速度 | 0.8m/s |
| 序号 | 传感器名称 | 数量 | |
| 1 | Mini计算机 |
CPU AMD® Ryzen3 3200G 芯片组 AMD® A300 内存 DDR4 8GB 硬盘 NVMe 250GB 系统 OS系统 键盘/手柄控制机器人运动 joystick_drivers短距离控制 Cartographer 2D SLAM建图/定位teb_local_planer 多点导航 基于弹性带理论机器人局部路径规划 循环循迹全局规划器 Simulation 仿真模拟器 |
1 |
| 2 | 电源组件 |
电池 :24V DC磷酸铁锂电池 电池容量 16AH @ 24V 输入/输出 24V x 10A / 12V x 20A 输出口数量 5个XT30(并联) 纹波电压 < 100mV |
1 |
| 3 | 显示器 |
尺寸 13.3 英寸1080P HDR 前后单线激光雷达 测量距离 0.15-10 m @ 10% 角度分辨率 0.36 ° 扫描速度 15 Hz 重复精度 ±3 cm 距离分辨率 1 cm |
1 |
| 4 | 深度相机 |
尺寸 103mmx33mmx22mm 传感器 ToF CCD+RGB 激光发射器 940nm VCSEL ToF分辨率帧率 640X480, Max.30fps RGB分辨率帧率 1920X1080, 30fps ToF FOV 69°(H) × 51°(V) RGB FOV 73°(H) × 42°(V) 输出格式 RAW12(深度,IR), MJPEG(RGB) 检测距离 0.35m~4.4m 工作温度 -10℃~50℃ |
1 |
友情提示:
1、货品验收:阁下收货时请检查智能无人驾驶小车的货品外观,核实智能无人驾驶小车的数量及配件,拒收处于受损状态的智能无人驾驶小车;
2、质保:顶邦将为阁下提供智能无人驾驶小车产品说明书内的质保条件和质保期,在质保范围内提供对智能无人驾驶小车的免费维修,超出条件承诺时提供对智能无人驾驶小车的有偿维修;
3、退换货:阁下单方面原因导致的智能无人驾驶小车选型错误或智能无人驾驶小车购买数量错误,造成智能无人驾驶小车的退换货要求,将不被接受;
4、货期:智能无人驾驶小车的发货期为参考值,如您需要了解智能无人驾驶小车的精确货期,请与顶邦的销售人员联系;
5、如阁下对智能无人驾驶小车有任何疑问,请致电:021-36334717 ,我们将由专业人士为您提供有关智能无人驾驶小车的咨询。
找不到想找的产品?请点击产品导航页 |
