
һ��ʵѵĿ��
(1) �˽ⵥ�ջ�ֱ������ϵͳ��ԭ������ɼ�����Ҫ��Ԫ������ԭ����
(2) ���յ��ջ�ֱ������ϵͳ�ĵ��Է�����������ֹ��������������
(3) ��������ת�ٸ�������ϵͳ�е����á�
(4) �ܶ�һЩ�������Ͻ��з����봦����
����ʵѵ����Ҽ�������
| ��� | �� �� | �� ע |
| 1 | GDQ01��Դ������ | |
| 2 | DK03��բ������· | |
| 3 | DK04���ྦྷբ�ܴ�����· | |
| 4 | DK06 ������ٿ��Ƶ�·I | |
| 5 | DQ29-2 �ɵ������� | |
| 6 | DQ03-1�������p����ϵͳ������ת�ٱ� | |
| 7 | DQ07-1 ֱ������� | |
| 8 | DQ09 ֱ�������綯�� | |
| 9 | ��ɨ��ʾ���� | �Ա� |
| 10 | ���ñ� | �Ա� |
����ʵѵ��·��ԭ��
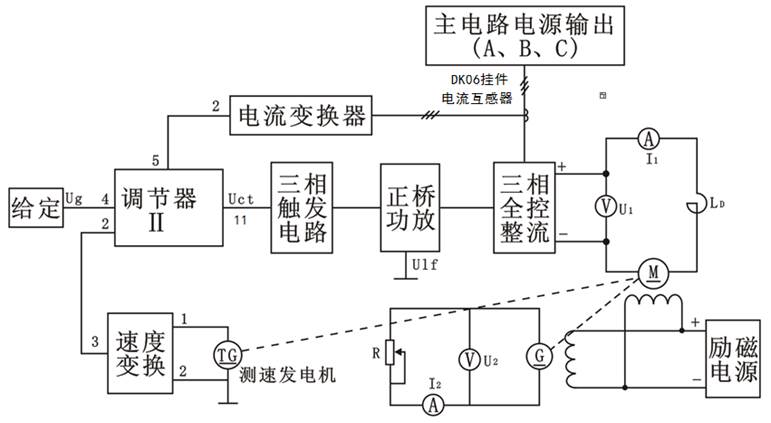
ͼ4-2��������ֹ��������ת�ٵ��ջ�ֱ������ϵͳ��Ld=200mH��R=2250Ω��
ת�ٵ��ջ�ֱ������ϵͳ�ǽ���ӳת�ٱ仯�ĵ�ѹ�ź���Ϊ�����źţ���“�ٶȱ任”��ӵ�“����������”������ˣ���“����”�ĵ�ѹ��Ƚϣ����Ŵ�õ�������Ƶ�ѹUCt���������������ŵ�“������·”���������徭���ʷŴ��ӵ���բ�ܵ��ż�������֮�䣬�Ըı�“����ȫ������”�������ѹ����������ٶȸ������ջ�ϵͳ�������ת���������ѹ�仯��������ת����“����������”����������������ڱ�ϵͳ�� “����������”�ɲ���PI���������֣�����������P����������������������P��������������ʱ�����о������ϵͳ������“��������”�ı����Ŵ�ϵ���������ϵͳ�ľ�����Ӳ�ȡ�Ϊ�˷�ֹ�����������й��̹����г��ֹ���ĵ��������ϵͳ�����˵�����ֹ����������“�������������������FBC+FA��”ȡ������������ȵĵ�ѹ�źţ�FBC+FA��“2”�ˣ����������������һ��ֵʱ����“����������”��“5”����ѹ�ܻ������ͳ����������źŽ���“����������”�����ۺϵ��ڣ������Ƶ��������������������ֵ��
�ġ�ʵѵ����
(1) ���ྦྷբ�ܴ�����·�ĵ��ԡ�
(2) �ⶨ�ͱȽ�ֱ���綯��������е���Ժ�ת�ٵ��ջ�ֱ������ϵͳ�ľ����ԡ�
(3) ����������ֹ��������ת�۵㣬���������������ЧӦ������ɨ��ʾ�����۲�ͼ�¼ϵͳ���������ֹ��������ͻ�Ӹ�������ʱ����Id��ת��n�IJ��Ρ�
�塢ʵѵ����
(1) DK03��DK04�ϵ�“������·”���Լ�������ʵ���ߡ�
(2) ֱ�����������е���ԵIJⶨ
�� ��ͼ4-2�ֱ�����·�Ϳ��ƻ�·�Ӻ��ߡ�DK04�ϵ�������Ƶ�ѹUct��DK06�Ҽ��ϵ�“����”���Ugֱ�ӽ��룬ֱ��������Ӹ��ص���R��R��2250Ω��������900Ω����֮��������900Ω��������Ld��DK03��200mH������������������㡣
�� �ȱպ����ŵ�Դ���أ�����GDQ01“��Դ������”������ť��ʹ����·������ཻ����Դ��Ȼ����㿪ʼ������“����”��ѹUg��ʹ�綯��ת���������߲�ʹת�� n �ﵽ1200r/min��
�� �ı为�ص���R����ֵ��ʹ����ĵ�������Ӷ����Iedֱ�����أ���������¼�������±���
| n��r/min�� | |||||||
| Id��A�� |
��������Ƶ�ѹUct���ڷ�Χ��ȷ��
ֱ�ӽ�DK06“����”��ѹUg����DK04������Ƶ�ѹUct������ˣ�”����ȫ������”����ӵ��踺��R����ʾ�����۲�Ud�IJ��Ρ�����������ѹUg�������ʱ��Ud���������ѹ�����������Ug����ijһ��ֵUg��ʱ��Ud�IJ��λ����ȱ���������ʱUd������Ug���������С��һ���ȷ��������Ƶ�ѹ���������ֵUctmax=0.9Ug������Ug���������ڷ�ΧΪ0��Uctmax��������ǰѸ����������ΪUctmax�Ļ�����“����ȫ������”�����Χ�ͱ��������Ṥ��������ֵ״̬����֤������բ�ܿɿ���������¼Ug�����±��У�
| Ug����V�� | |
| Uctmax=0.9Ug����V�� |
�� �������ĵ���
��DK06��“��������”��������˽ӵأ��õ��߽�“9”��“10”�̽ӣ�ʹ“��������”��ΪP (����)����������������ϵĵ����λ��RP3�������ñ��ĺ���������“��������”��“11”�ˣ�ʹ�������������ѹ�����ܽӽ����㡣
�� ��������������ֵ�ĵ���
��“��������”��“9”��“10”�˶̽���ȥ������ʱ���������ΪPI (��������)��������Ȼ��DK06�Ҽ��ϵĸ�������˽ӵ����������“4”�ˣ�����һ����������ʱ������������λ��RP2��ʹ“��������”�������ѹΪ��Сֵ��������������˼Ӹ�����ʱ������������λ��RP1��ʹ֮�������ֵΪUctmax��
�� ת�ٷ���ϵ��������
ֱ�ӽ�“����”��ѹUg��DK04��“������Ƶ�ѹUct”������ˣ�“����ȫ������”��·��ֱ���綯�����أ�Ld��DK03�ϵ�200mH��������������㡣
�����ŵ�Դ���أ�����������ť�����������Ӹ�����ʹ������ٵ�n =150Or/min������“�ٶȱ任”��ת�ٷ�����λ��RP1��ʹ�ø�ת��ʱ������ѹUfn=+6V����ʱ��ת�ٷ���ϵ��α =Ufn/n =0.004V/(r/min)��
(4) ת�ٸ��������ջ�ֱ������ϵͳ���Լ��ջ������ԵIJⶨ��
�� ��ͼ4-2���ߣ������任���ĵ������������“2”��Ҫ�ӣ����ڱ�ʵ���У�DK06��“����”��ѹUgΪ��������ת�ٷ�����ѹΪ��ֵ����“��������”�ӳ�PI���������֣���������ֱ��������Ӹ��ص���R��R��2250Ω��������900Ω����֮��������900Ω��������Ld��DK03��200mH��������������㡣
�� ֱ������������أ����㿪ʼ����“����”��ѹUg��ʹ�綯����ת�ٽӽ�n=l200r/min��
�� ��С�������ֱ�����������I������綯���ĵ������Id�͵����ת��n��ֱ��Id=Ied�����ɲ��ϵͳ��̬��������n =f(Id)��
| n��r/min�� | |||||||
| Id��A�� |
����220V������A�࣬B�࣬C�ྭ��DK06�ϵ�“����������”��Ӧ���ӵ�DK03�ϵ�����·���룬�����任�������“TA1��TA2��TA3”����ӣ��ڲ��ѽӵ���·�壩���ѵ����任���ĵ������������“2”�ӵ�“��������”�������“5”�����㿪ʼ����“����”��ѹUg��ʹ�綯����ת�ٽӽ�n=l200r/min����С�������ֱ�����������I��ʹ����·��������1A����������������Ԫ��FBC+FA���еĵ���������λ��RP1��ʹ����������ѹ“If”������ֱ����“��������”�������“5”���ӵ���ѹ�ܻ�������ʱ�綯����ת�ٻ����Խ��ͣ�˵��������ֹ�����������Ѿ������á�IN��Ϊ��ֹ������ͣ�����ͻ�Ӹ��������綯����
�� ��̬���εĹ۲졣�ȵ��ںø�����ѹUg��ʹ�綯����ijһת�������У��Ͽ�������ѹUg�Ŀ���S2��Ȼ��ͻȻ����S2 ����ͻ�Ӹ��������綯��������ɨ��ʾ�����۲�ͼ�¼ϵͳ���������ֹ��������ĵ���Id��ת��n�Ķ�̬�������ߡ�
�� �ⶨ���������ԡ����е�����ֹ���������ڵ�ת�ٸ��������ջ�ֱ������ϵͳ�ľ����������������ԣ���ⶨ�������£������Ӹ���Ug��ʹ�綯��ת�ٽӽ�n=l200r/min����С�������ֱ�����������I��ʹ����·��������1A����¼�����������ݡ�Ȼ������ı为��Rʹ����������ֹ������ת���½����ӽ�����Ϊֹ����¼����ת�ٺ͵��������ݣ��ɻ������������ԡ�
| n��r/min�� | |||||||
| Id��A�� |
(1) ����ʵ�����ݣ�����ֱ���綯��������е���ԡ�
(2) ����ʵ�����ݣ�����ת�ٵ��ջ�ֱ������ϵͳ�ıջ������ԡ�
(3) ���㲢�Ƚϻ�е���Ժ;����Եľ�����S��
�ߡ�ע������
(1) �������ǰ��Ӧ�ȼ��ϵ綯�������ţ�����ʹ���������
(2) ��ϵͳδ���������ֹ����������ʱ��������ͻ�Ӹ����������������ij��������ʹ��������������ʵѵ�����С�
(3) ͨ��ʵ��ʱ�������õ�����Ϊ�����ŵĸ��أ���ȷ����·�������������ٻ��ɵ綯����Ϊ���ء�
(4) �����ӷ����ź�ʱ�������źŵļ��Ա����뷴���źŵļ����෴��ȷ��Ϊ����������������ʧ�ء�
(5) ֱ���綯���ĵ��������Ҫ�����ֵʹ�ã�ת��Ҳ��Ҫ����1.2���Ķֵ������Ӱ������ʹ���������������⡣
(6) DK04�Ҽ��ϵ�“����”��DK06֮�䲻���أ�����ʵѵʱ��̽�DK04��DK06�ĵء�