
������Σ�ͨ�û����豸��װ�����ʵѵװ��ͨ���䱸���Ƚ��Ŀ���ϵͳ�ͼ���豸������ʵʱ�����豸������״̬�����ܲ����������ѧ���Ĺ۲�������Ӧ�ٶȺͷ����ж����������������м���İ�����ͬʱ��ͨ�����ַ�ʽ��ѧ���������˽��ʵ�ʹ����п������������⼰�����������Ӷ���ǰ����Ӧ������
�������ߣ�ͨ�û����豸��װ�����ʵѵװ�û��������õİ�ȫ�Ժͻ����ԡ����еIJ������ڰ�ȫ�ĸ��������ڽ��У������˶���ʵ�豸����Ա��DZ����в��ͬʱ����װ��Ҳ�����ִ���ҵ�Ļ���Ҫ����Ի�������κθ���Ӱ�졣
�����ܵ���˵��ͨ�û����豸��װ�����ʵѵװ����һ�ָ�Ч��ʵ�õĽ�ѧ���ߣ����ܹ���Ч������ѧ����ʵ�����ܣ���ǿ���ǵ���������������Ϊ����δ����ְҵ���Ĵ��¼�ʵ�Ļ�����
DB-GJD42 ͨ�û����豸��װ�����ʵѵװ��
�ο�ͼ����ʵ��ͼΪ��
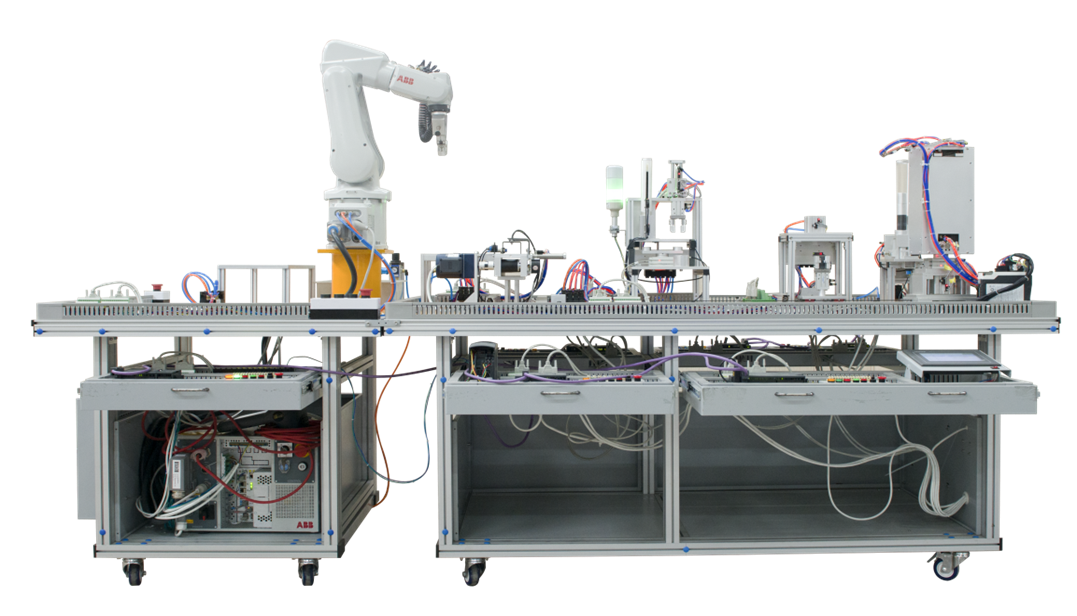
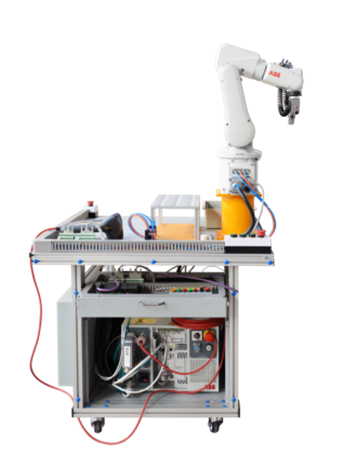
һ��ʵѵװ�õĹ��ɣ��ο�ͼ����ʵ��ͼΪ��
ͨ�û����豸��װ�����ʵѵװ���������Ͻ�ʽʵѵ̨�����͵Ļ���һ�廯�豸�Ļ�е������PLCģ�顢��Ƶ��ģ�顢��ťģ�顢��Դģ�顢ģ�������豸ʵѵģ�顢���߶����ź��ִ����������������ɡ�ͨ�û����豸��װ�����ʵѵװ������ṹ���ÿ���ʽ�Ͳ�װʽ��ʵѵװ�����ڻ�е������װ���ɸ������еĻ�е������װ�����豸��Ҳ�����ӻ�е������װ���������豸��ʹ����װ���ܹ����İ���ѧ����Ҫ����װ�����������ܵĻ���һ�廯�豸��ͨ�û����豸��װ�����ʵѵװ��ģ����ñ��ṹ�ͳ���ʽģ����üܣ�������ǿ�������������Թ��ܺ�����ѧϰ���ܵ�ԭ��ȷ��ģ�����ݣ�ʹ��ѧ����ʱ�ɷ����ѡ����Ҫ��ģ�顣ͨ�û����豸��װ�����ʵѵװ��������繤����ȫ��ְҵ���ܴ�����Ҫ��ͬʱ��Ҫ����п���չ���ܣ�������ɸ��Ӵ��͵�����ģ��ϵͳ������ϸ����û�ѧУ��ͬ��Σ���ͬרҵ�Ľ�ѧ����ѵҪ��
����ʵѵ����װ�õ����ã�
| ��� | ���� | ��ҪԪ�����ͺš���� | ���� | ��ע |
| 1 | ʵѵ�� | 2100×1000×840 mm | 1�� | ��̨���õ���30*60�����Ͳ� |
| 2 | ������ģ�� | 7Ӣ�� ������̬ͨ | 1�� | |
| 3 | PLCģ�� |
ѡ�������� CPU1214C��14DI/10DO 5̨ ��ҵ������1̨ �����ߡ�5���� ����ɣ�1�������Ӳ�����ӡ����ԣ���2������������á����ԣ���3������485�ֳ����߶�̨PLC�ĸ����������ݶ�д�����д����ԡ� |
1�� | |
| 4 | ��Ƶ��ģ�� | ������G120C ����≥0.37KW | 1�� | |
| 5 | ��Դģ�� | �����Դ�ܿ��أ���©��Ͷ�·������1�����۶���3ֻ�������Դ����2������ȫ����5���� | 1�� | |
| 6 | ��ťģ�� | 24 V/6 A��12 V/2 A��һ�飻��ͣ��ť1ֻ��ת������2ֻ��������1ֻ����λ��ť�ơ��̡����1ֻ��������ť�ơ��̡����1ֻ��24Vָʾ�ƻơ��̡����2ֻ�� | 1�� | |
| 7 | ���Ͳ��� | ��Ҫ����˫��е�֣�ֱ���䵥Ԫ���������ͻ�������ܰ�װ֧�ܣ�ͬ���֣�ͬ����, ���������߶��ӵ�Ԫ����� | 1�� | |
| 8 | Ƥ�����ͻ����� | ������ٵ����380 V�����ת��40r/min��1̨��ƽƤ��1355×49×2 mm 1���� | 1�� | |
| 9 | �ӹ����� | ��Ҫ������̨�����ϼн�װ�á�����ʽ��ά�˶�װ�á��������������Լ���Ӧ�Ĵ����������Կ��ء���ŷ��������������������������������˿�˸���֧�ܡ���е�㲿�����ɡ� | 1�� | |
| 10 | �����װ���� | ��Ҫ�ɾ�ʽ���ϵ�Ԫ������λ��ת����̨��ƽ����С���ѹװ�䵥Ԫ����紫�������Կ��أ�ŷķ��������ŷ��������ŷ��������������֧�ܡ���е�㲿�����ɡ� | 1�� | |
| 11 | ����ּ� | ����������3ֻ������������1ֻ�������2ֻ�����Կ���6ֻ���������3�������ص�Ż���3ֻ�����͵�ŷ��������ձ�SMC | 1�� | |
| 12 | ��������ⲿ�� | ��Ҫ�����������������˵�Ԫ����������� | ||
| 13 | ���߶���ģ�� | ���߶��ӺͰ�ȫ���� | 1�� | |
| 14 | ���� | ����5���������ڰ�5�� | 15�� | |
| 15 | ��ȫ���� | 1�� | ||
| 16 | ���� | Φ4Φ6������Ϊ��ɫ��ÿ̨������������ | 1�� | |
| 17 | PLC������� | 1�� | ||
| 18 | ������������ͨ���� | 1�� | ||
| 19 | ��������PLCͨ���� | 1�� | ||
| 20 | ������ | 1�� | ||
| 21 | ��Ʒ������ | 1�� | ||
| 22 | �� | 1�� | ||
| 23 | �����Ƴ� | ���������γߴ磺��×��×�ߣ�600mm×530mm×1000mm�� | 1̨ | |
| 24 | ��������ѹ���� | 0Mpa-1.0Mpa�����������Q65�ֱ������Ϲ��ұ� | 1̨ |
1. ������Դ���������� AC 380V±10% 50 Hz��
2. �¶ȣ�-10��40 �棻����ʪ�ȣ�≤90%��25�棩��
3. ���γߴ磺��×��×��=1200×800×1500 mm��
4. �������ģ�≤1.5 kW��
5. ��ȫ������ʩ�����нӵر�����©�籣�����ܣ���ȫ�Է�����صĹ��ұ������ø߾�Ե�İ�ȫ�Ͳ���������Ե���ĸ�ǿ�Ȱ�ȫ��ʵ�鵼�ߡ�
�ġ��豸�ṹ��
ͨ�û����豸��װ�����ʵѵװ��̨��Ϊ���Ͻ�ʽ��ʵѵ����װ��PLCģ���I/O ���ӡ���Ƶ���Ľ��߶��ӡ�������ģ����PLC�����Ӷ��ӣ����밲ȫ�������ӣ�ʹ�ô���ȫ��ͷ�ĵ��߽��е�·���ӣ���ָ��ء���翪�ء���������ָʾԪ���ĵ�·����ͨ�������Ž������ӡ���������ӵ�·����������ӵ�·���ϣ��ȱ�֤ѧ���������ܵ�ѵ�����γɺ��̣��ֱ�֤��·���ӵĿ��١���ȫ�Ϳɿ���
1�����Ͻ�ʽʵѵ̨������װ���ϻ�������е�֡�����ּ������ʵѵģ�鼰PLC�����ȿ��Է���������ʽ��֧���ϡ�
2��������ģ�飺MCGS 7�紥����,ģ�����Ҫ��ǿ��������ǡ������ᣬ��������ܰ壬ͼ�������ַ��Ų��ý�����ī˿ӡ��
3��PLCģ�鼰��Ƶ��ģ�飺PLC 14������IO�����ӣ���Ƶ���������ӣ�ģ�����Ҫ��ǿ��������ǡ������ᣬ��������ܰ壬ͼ�������ַ��Ų��ý�����ī˿ӡ��
4����Դģ�飺�����Դ�ܿ��أ���©��Ͷ�·������1�����۶���3ֻ�������Դ����2������ȫ����5����
��ťģ�飺24 V/6 A��12 V/2 A��һ�飻��ͣ��ť1ֻ��ת������2ֻ��������1ֻ����λ��ť�ơ��̡����1ֻ��������ť�ơ��̡����1ֻ��24Vָʾ�ƻơ��̡����2ֻ��
5��һ�廯�����ţ������ſ������������������һ���������������߶��ӣ���һ�μ�����������ȫ�����������߶������Ӧ�İ�ȫ����ͨ�����絯�Լ����ӣ������ſ����Ե���ۣ����й̶��õ��ݿף����Թ̶���ʵѵ���ϡ�
6����ʽ���ϻ�������ʽ������1���������Ƴ�����1������紫����2ֻ�����Կ���2ֻ����������1ֻ�����ص�ŷ�1ֻ����ʾ��1ֻ����Ҫ��ɽ��������еĹ��������Ƴ�����������������ѡ��SMC��
7���ӹ���������Ҫ������̨�����ϼн�װ�á�����ʽ��ά�˶�װ�á��������������Լ���Ӧ�Ĵ����������Կ��ء���ŷ��������������������������������˿�˸���֧�ܡ���е�㲿�����ɡ�
8�������װ��������Ҫ�ɾ�ʽ���ϵ�Ԫ������λ��ת����̨��ƽ����С���ѹװ�䵥Ԫ����紫�������Կ��ء���ŷ����ձ�SMC����ֱ�����ٵ����֧�ܡ���е�㲿�����ɡ�
9�����Ϸּ�װ�ã����ʹ�ͨ�������첽�綯���������ڴ��ʹ��˵㴦��������Ͽڣ�ͨ����紫����������ϣ����ʹ���װ���������ϲۣ���Ӧλ���е�д����������˴������ȣ�ͬʱ�����ϲ�λ��װ���������ף������������ס����ʹ����ÿɲ�ж�����Ͻ�֧�ܡ���������������ѡ��SMC��
10���͵�Ԫ�Ļ������ܣ�
�õ�Ԫͨ����ָ����Ԫ������̨��ȷ��λ�����ڸ�����̨��ץȡ��������ץȡ���Ĺ������͵�ָ���ص�Ȼ����µĹ��ܡ�
���͵�Ԫ����Ҫ��ɣ�
��Ҫ����˫��е�֣�ֱ���䵥Ԫ���������ͻ�������ܰ�װ֧�ܣ�ͬ���֣�ͬ����, ���������߶��ӵ�Ԫ����ɡ�
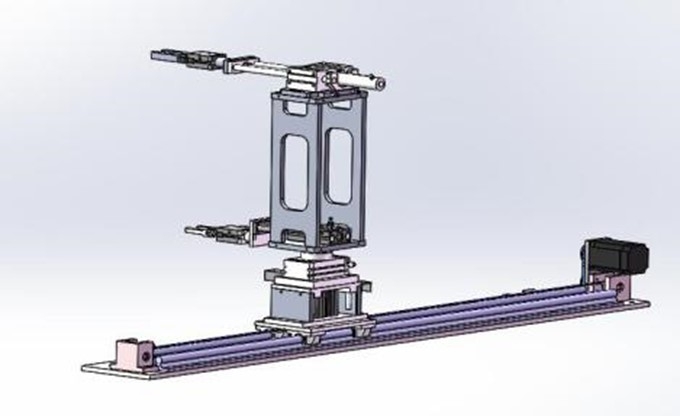
���͵�Ԫ������������
��վ�Ĺ�������������������Ԫ��������ϵͳ��Ϊ˫��е�ֵ�Ԫ��ֱ��λ��λ�þ�ȷ���Ƶ�Ԫ�����֣�ϵͳ�ϵ����ִ�л�ԭ�������������ԭ��λ�ú���ϵͳ����������վ����̨���������й���ʱ����е��������������λ����צ�����λ����צ�н�����צ�н���λ��צ��ʼ�����е�������½���λ���ŷ������ʼ�������趨�õ����������ӹ�վ���ӹ�վ��λ���е������������������λ����צ��������λ���е�������½����½���λ���ѷ���ӹ�վ����̨�ϣ�Ȼ����צ�ɿ����ɿ���λ���е�ֻ������ȼӹ�վ�ӹ���ɺ��ٽ������͵�װ��վ���д�С��װ�䣬װ����ɺ��е��ץȡ�����͵��ּ�վ���зּ�����˫��е�ֵ�һ���ӹ��˶����̾�����ˡ�ֻҪ��Ͳ��ȱ�ϻ�������Ϲ��̡�����Ͳ����ȱ�Ϻ����˻���˹������ϣ���е�ֻ����е�ȡ��λ��ץȡ�������ϵ�С�ϣ�Ȼ�����С��Ͳ�У�Ȼ��ԭ�㣬���������ٴΰ��˹������ϣ���е�ֻ����е�ȡ��λ��ץȡ�������ϵĴ��ϣ�Ȼ��������Ͳ�У�����һ�����ϵIJ�ֹ��̾�����ˣ�ֱ���������̨�ϵ�����ȫ�������ɺ�Ϊֹ��
6����������ⵥԪ
��������ⵥԪ�Ļ������ܣ�
�õ�Ԫ����Ҫ�����ǶԷּ������Ͻ����������Կ�������Ͻ��в�ֳ������
��������ⵥԪ����Ҫ��ɣ�
��Ҫ�����������������˵�Ԫ����צ�оߡ����������

��������ⵥԪ������������
��վ����Ҫ�����Ƕ����Ͻ��г�������ϵͳ�ϵ����ִ�и�λȻ����������ť��ϵͳ���и�λ����λ��ɺ�ϵͳֱ�����������ּ�վ�ּ���ɺ����˻ᵽ��Ӧ���ϲ�ץȡ���Ͻ������ŵ���Ӧ����̨�ϣ���̨�ϵ�һ���ǽ��������ڶ����ǰ��ϵ������Ǻ��ϡ�����̨����������˻��Զ������Ϸŵ����Ϻ��У������ϴ�����ֻҪ��Ͳ����ȱ�ϣ������˾ͻ����̨�ϵ����Ͻ��в�ֳ������
����ʵѵ��Ŀ
1���л��ں��˻�е������������������������������������ҵ�����ˡ������綯����Ƶ���ٺͲ�������������ơ�������������PLC���Ƽ�ͨ������ȼ������������ִ�����ҵ�������̵�������
�﹩�ϵ�Ԫ�İ�װ����Ե�ʵѵ��
��ӹ���Ԫ�İ�װ����Ե�ʵѵ��
��װ�䵥Ԫ�İ�װ����Ե�ʵѵ��
��ּ�Ԫ�İ�װ����Ե�ʵѵ��
�����͵�Ԫ�İ�װ����Ե�ʵѵ��
����ⵥԪ�İ�װ����Ե�ʵѵ��
���Զ������߿��Ƶİ�װ����Ե�ʵѵ��
2�����ڽ�ѧ���ɰ��������̵���ѧ��ϵ�ģʽ�滮��ѧ���������¹�������
1������ϵͳ�İ�װ�������Ŀ��
ѡ�ø�װ�����õĵ��������ס�����˫�����ס���ת��������ִ��Ԫ���͵��ص�Ż���˫�ص�Ż��ʹ��Կ��ء�������շ���������������Ԫ����������������������Ĺ�������
������������ƻ�·�İ�װ��
�������ٶȿ��ƻ�·�İ�װ��
��ڶ����ƻ�·�İ�װ��
������˳����ƻ�·�İ�װ��
��������е��װ�õİ�װ��
������ϵͳ��װ����ԣ�
�������ۺ�ϵͳ������밲װ��
2���������Ƶ�·�İ�װ�ͻ������Լ�PLC�����д��Ŀ��
ѡ�ø�װ�����õ�PLCģ�顢�����ˡ���Ƶ��ģ����ŷ�����ģ�顢�������ȣ����������PLCӦ�ü�����������
������綯������ת���Ƶ�·����������Ƴ����д��
������綯�����Ƶ�·����������Ƴ����д��
��綯�����ٿ��Ƶ�·����������Ƴ����д��
���Ƶ��ģ�������Ƶ���������Ƴ����д��
���ŷ�������Ƶ�·��������������ã�
��PLC����������Ƽ�����
������������Ƴ����д��
������˳�������Ƴ����д��
��������е�ֿ��Ƴ����д��
��Ƥ�����ͻ����Ƴ����д��
�������Ӳ������ʵѵ��
�������ʾ�̲���ʵѵ��
������˱��ʵѵ��
�������������ʵѵ��
���������PLCͨѶʵѵ��
������˷����ѧʵѵ��
�����һ�廯�豸���Ƴ����д��
���Զ������߿��Ƴ����д��
3��PLCͨѶ����İ�װ��������Ƽ����ԣ�
��PLC���Ƽ���---485ͨ�ż����ı�̺͵���
4�������豸��װ�������Ŀ
ѡ�ø�װ�����õĻ���һ�廯�豸������PLCģ�顢�����ˡ���Ƶ��ģ���ָ��ء��������ȣ���������л����豸��װ�ͻ���һ�廯�����Ĺ�������
�ﴫ��װ��ͬ��ȵĵ�����
�﹩�ϵ�Ԫ�Ļ�е��װ�������
��ӹ���Ԫ�Ļ�е��װ�������
��װ�䵥Ԫ�Ļ�е��װ�������
��ּ�Ԫ�Ļ�е��װ�������
�����͵�Ԫ�Ļ�е��װ����ԣ�
����ⵥԪ�Ļ�е��װ����ԣ�
���Զ��������豸��װ����ԡ�
3����װ�����ڿ��˻��ܾ������ɿ����ְҵ������
���е������װ�������������
������豸�İ�װ�����������
���·��װ������
������ϵͳ�İ�װ�����������
���Ƶ�����Զ������ߵ�ʹ��������
���ŷ�������Զ������ߵ�ʹ��������
��PLCģ�����������Զ������ߵ�ʹ��������
�������Ӳ������ʵѵ��
������˱��ʵѵ��
���������PLCͨѶʵѵ��
�����һ�廯�豸�Ŀ��Ƴ���ı�д������
���Զ�����ϵͳ�İ�װ�����������
��PLC����İ�װ����������������
���˻����桢��̬�����ı�����������